
Как сделать робота из досок
Обновлено: 28.04.2024
Сейчас уже мало кто помнит, к сожалению, что в 2005 году были Chemical Brothers и у них был замечательный клип — Believe, где роботизированная рука гонялась по городу за героем видео.
Тогда у меня появилась мечта. Несбыточная на тот момент, т. к. ни малейшего понятия об электронике у меня не было. Но мне хотелось верить — believe. Прошло 10 лет, и буквально вчера мне удалось впервые собрать своего собственного робота-манипулятора, запустить его в работу, затем сломать, починить, и снова запустить в работу, а попутно найти друзей и обрести уверенность в собственных силах.
Сначала была паранойя
Как истинный параноик, сразу выскажу опасения, которые у меня изначально были относительно конструктора. В моём детстве сперва были добротные советские конструкторы, потом рассыпающиеся в руках китайские игрушки… а потом детство кончилось:(
- Пластмасса будет ломаться и крошиться в руках?
- Детали будут неплотно подходить друг к другу?
- В наборе будут не все детали?
- Собранная конструкция будет непрочной и недолговечной?
- Часть деталей придётся допиливать напильником
- А части деталей просто не будет в наборе
- И ещё часть будет изначально не работать, её придётся менять
Детали конструктора не только отлично подходят друг к другу, но также продуман тот момент, что детали почти что невозможно перепутать. Правда, с немецкой педантичностью создатели отложили винтиков ровно столько сколько нужно, поэтому терять винтики по полу или путать «какой куда» при сборке робота нежелательно.
Технические характеристики:
Длина: 228 мм
Высота: 380 мм
Ширина: 160 мм
Вес в сборке: 658 гр.
Питание: 4 батарейки типа D
Вес поднимаемых предметов: до 100 гр
Подсветка: 1 светодиод
Тип управления: проводной дистанционный пульт
Примерное время сборки: 6 часов
Движение: 5 коллекторных моторов
Защита конструкции при движении: храповик
Подвижность:
Механизм захвата: 0-1,77''
Движение запястья: в пределах 120 градусов
Движение локтя: в пределах 300 градусов
Движение плеча: в пределах 180 градусов
Вращение на платформе: в пределах 270 градусов
- удлинённые плоскогубцы (не получится обойтись без них)
- боковые кусачки (можно заменить на нож для бумаги, ножницы)
- крестовая отвёртка
- 4 батарейки типа D
Важно! О мелких деталях
Кстати о «винтиках». Если вы сталкивались с подобной проблемой, и знаете, как сделать сборку ещё удобнее — добро пожаловать в комментарии. Пока что поделюсь своим опытом.
Одинаковые по функции, но разные по длине болты и шурупы достаточно чётко прописаны в инструкции, например, на средней фото внизу мы видим болты P11 и P13. А может P14 — ну, то есть, вот опять, я снова их путаю. =)
Различить их можно: в инструкции прописано, какой из них сколько миллиметров. Но, во-первых, не будешь же сидеть со штангенциркулем (особенно если тебе 8 лет и\или у тебя его попросту нет), а, во-вторых, различить их в итоге можно только, если положить рядом, что может не сразу прийти на ум (мне не пришло, хе-хе).
- либо заранее присмотритесь к крепёжным элементам;
- либо купите себе побольше мелких винтов, саморезов и болтов, чтобы не париться.
Также, ни в коем случае не выбрасывайте ничего, пока не закончите сборку. На нижней фотографии в середине, между двумя деталями от корпуса «головы» робота — небольшое кольцо, которое чуть не полетело в мусор вместе с прочими «обрезками». А это, между прочим, держатель для светодиодного фонарика в «голове» механизма захвата.
Процесс сборки
К роботу прилагается инструкция без лишних слов — только изображения и чётко каталогизированные и промаркированные детали.
Детали достаточно удобно откусываются и зачистки не требуют, но мне понравилась идея каждую деталь обработать ножом для картона и ножницами, хотя это и не обязательно.
Сборка начинается с четырёх из пяти входящих в конструкцию моторов, собирать которые настоящее удовольствие: я просто обожаю шестерёночные механизмы.
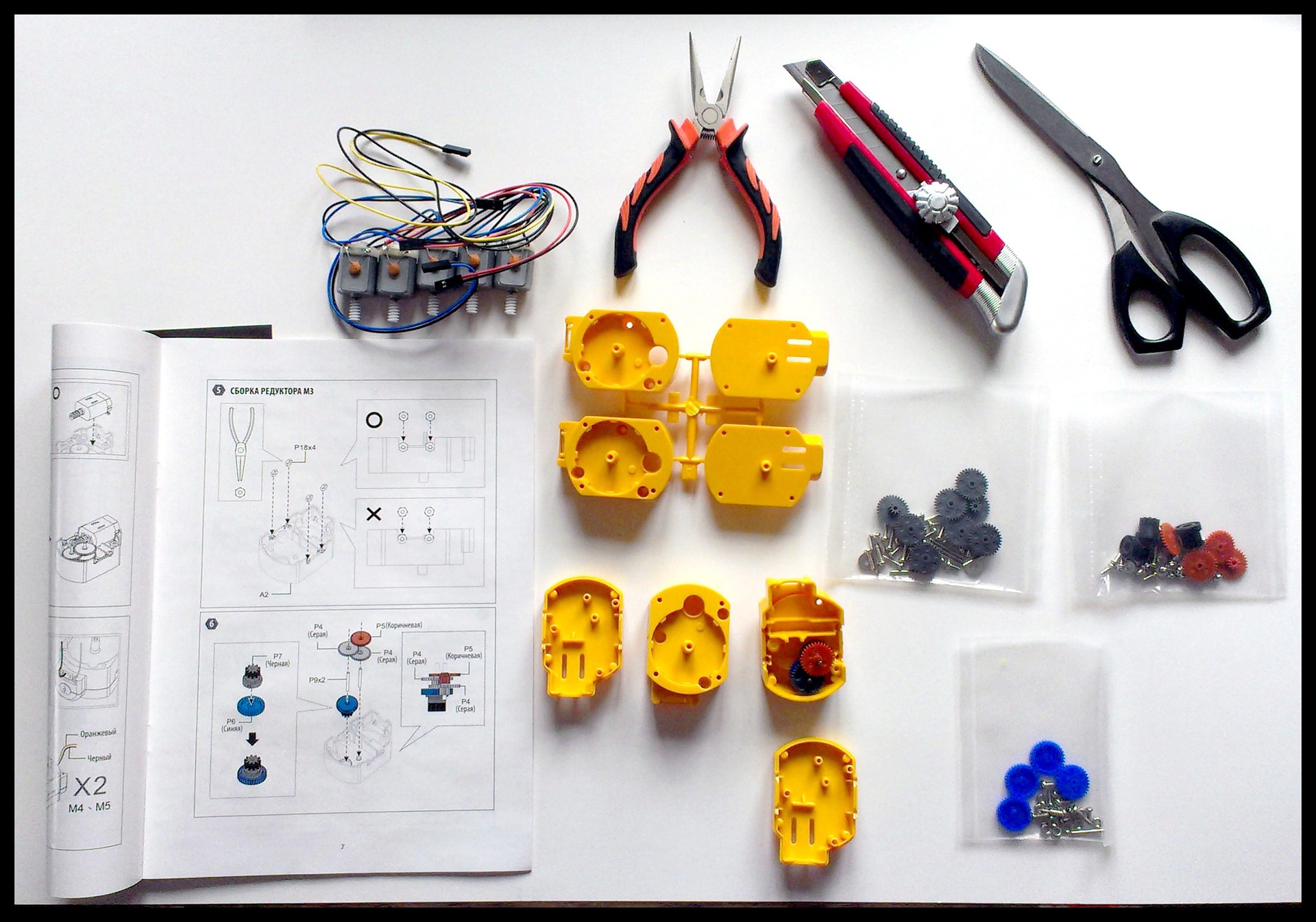
Моторчики мы обнаружили аккуратно упакованными и «прилипшими» друг к другу — готовьтесь ответить на вопрос ребёнка, почему коллекторные моторчики магнитятся (можно сразу в комментариях! :)
Важно: в 3 из 5 корпусов моторчиков нужно утопить гайки по бокам — на них в дальнейшем мы посадим корпуса при сборке руки. Боковые гайки не нужны только в моторчике, который пойдёт в основу платформы, но чтобы потом не вспоминать, какой корпус куда, лучше утопите гайки в каждом из четырёх жёлтых корпусов сразу. Только для этой операции будут нужны плоскогубцы, в дальнейшем они не понадобятся.

Примерно через 30-40 минут каждый из 4х моторов оказался снабжён своим шестереночным механизмом и корпусом. Собирается всё не сложнее, чем в детстве собирался «Киндер-сюрприз», только гораздо интереснее. Вопрос на внимательность по фото выше: три из четырёх выходных шестерёнок черные, а где белая? Из её корпуса должны выходить синий и чёрный провод. В инструкции это всё есть, но, думаю, обратить на это внимание ещё раз стоит.
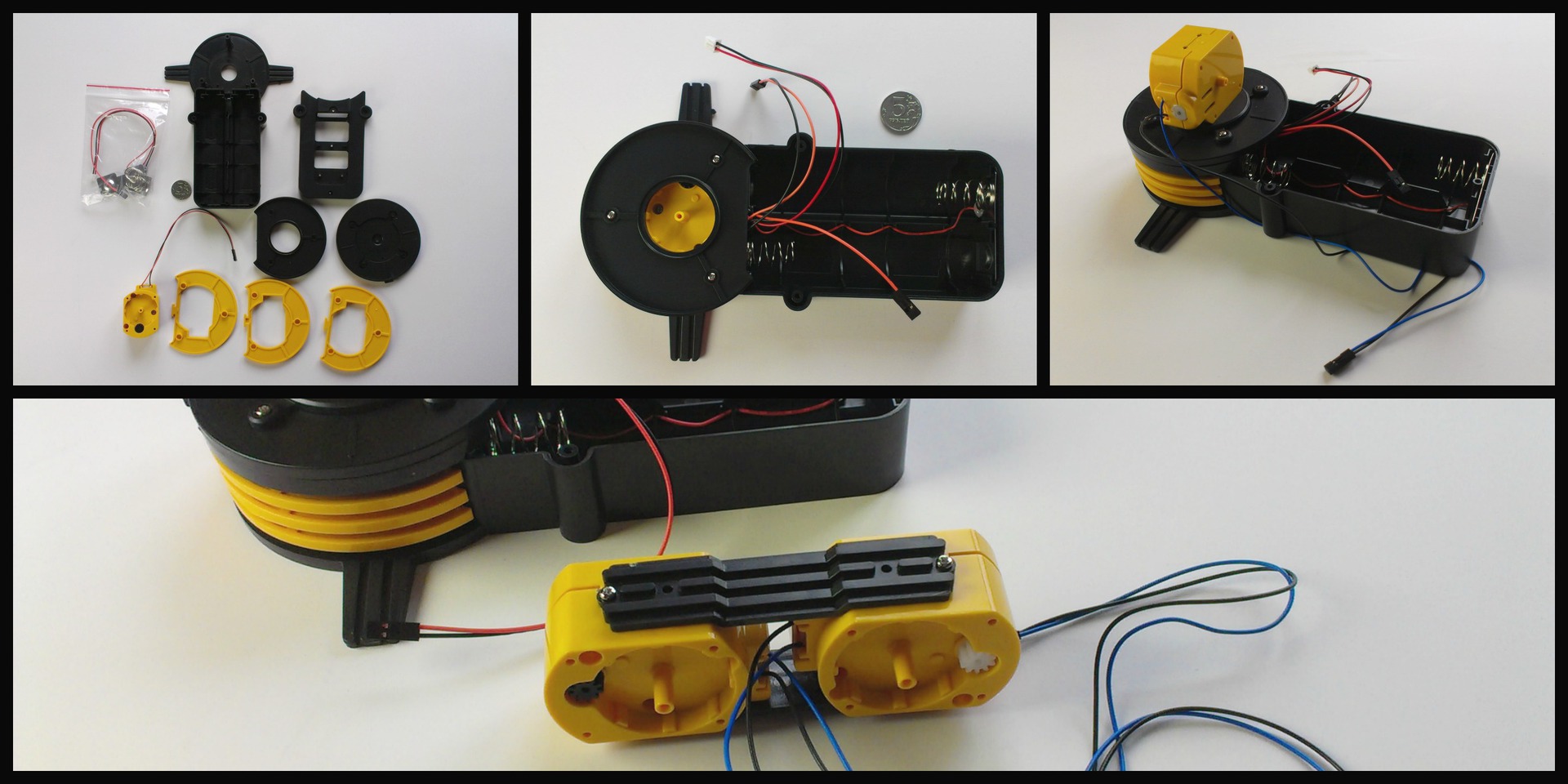
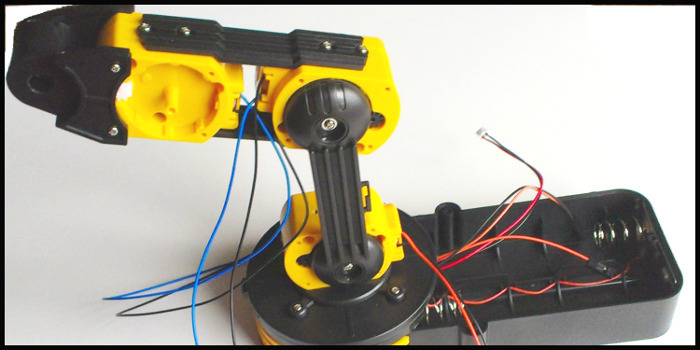
После того, как у вас на руках оказались все моторы, кроме «головного», вы приступите к сборке платформы, на которой будет стоять наш робот. Именно на этом этапе ко мне пришло понимание, что с шурупами и винтами надо было поступать более вдумчиво: как видно на фото выше, двух винтов для скрепления моторчиков вместе за счет боковых гаек мне не хватило — они уже были где-то мною же вкручены в глубине уже собранной платформы. Пришлось импровизировать.
Когда платформа и основная часть руки собраны, инструкция предложит вам перейти к сбору механизма захвата, где полно мелких деталей и подвижных частей — самое интересное!

Но, надо сказать, что на этом спойлеры закончатся и начнутся видео, так как мне нужно было ехать на встречу с подругой и робота, которого не удалось успеть закончить, пришлось захватить с собой.
Как стать душой компании при помощи робота
Легко! Когда мы продолжили сборку вместе, стало понятно: собирать робота самостоятельно — очень приятно. Работать над конструкцией вместе — приятно вдвойне. Поэтому смело могу рекомендовать этот набор для тех, кто не хочет сидеть в кафе за скучными разговорами, но хочет повидаться с друзьями и хорошо провести время. Более того, мне кажется, и тимбилдинг с таким набором — например, сборка двумя командами, на скорость — практически беспроигрышный вариант.
Робот ожил в наших руках сразу, как только мы закончили сборку. Передать вам наш восторг, я, к сожалению, не могу словами, но, думаю, многие меня здесь поймут. Когда конструкция, которую ты сам собрал вдруг начинает жить полноценной жизнью — это кайф!
Мы поняли, что жутко проголодались и пошли поесть. Идти было недалеко, поэтому робота мы донесли в руках. И тут нас ждал ещё один приятный сюрприз: робототехника не только увлекательна. Она ещё и сближает. Как только мы сели за столик, нас окружили люди, которые хотели познакомиться с роботом и собрать себе такого же. Больше всего ребятам понравилось здороваться с роботом «за щупальца», потому что ведёт он себя действительно как живой, да и в первую очередь это же рука! Словом, основные принципы аниматроники были освоены пользователями интуитивно. Вот как это выглядело:
Troubleshooting
По возвращении домой меня ждал неприятный сюрприз, и хорошо, что он случился до публикации этого обзора, потому что теперь мы сразу обговорим troubleshooting.
Решив попробовать подвигать рукой по максимальной амплитуде, удалось добиться характерного треска и отказа функциональности механизма мотора в локте. Сначала это меня огорчило: ну вот, новая игрушка, только собрана — и уже больше не работает.
Но потом меня осенило: если ты сам её только что собрал, за чем же дело стало? =) Я же прекрасно знаю набор шестерёнок внутри корпуса, а чтобы понять, сломался ли сам мотор, или просто недостаточно хорошо был закреплён корпус, можно не вынимая моторчика из платы дать ему нагрузку и посмотреть, продолжатся ли щелчки.
Вот тут-то мне и удалось почувствовать себя настоящим робо-мастером!

Аккуратно разобрав «локтевой сустав», удалось определить, что без нагрузки моторчик работает бесперебойно. Разошёлся корпус, внутрь выпал один из шурупов (потому что его примагнитил моторчик), и если бы мы продолжили эксплуатацию, то шестерёнки были бы повреждены — в разобранном виде на них была обнаружена характерная «пудра» из стёршейся пластмассы.
Очень удобно, что робота не пришлось разбирать целиком. И классно на самом деле, что поломка произошла из-за не совсем аккуратной сборки в этом месте, а не из-за каких-то заводских трудностей: их в моём наборе вообще обнаружено не было.
Совет: первое время после сборки держите отвёртку и плоскогубцы под рукой — могут пригодиться.
Что можно воспитать благодаря данному набору?
Уверенность в себе!
Мало того, что у меня нашлись общие темы для общения с совершенно незнакомыми людьми, но мне также удалось самостоятельно не только собрать, но и починить игрушку! А значит, я могу не сомневаться: с моим роботом всегда всё будет ок. И это очень приятное чувство, когда речь идёт о любимых вещах.
Мы живём в мире, где мы страшно зависим от продавцов, поставщиков, сотрудников сервиса и наличия свободного времени и денег. Если ты почти ничего не умеешь делать, тебе за всё придётся платить, и скорее всего — переплачивать. Возможность починить игрушку самому, потому что ты знаешь, как у неё устроен каждый узел — это бесценно. Пусть у ребёнка такая уверенность в себе будет.
Итоги
- Собранный по инструкции робот не потребовал отладки, запустился сразу
- Детали почти невозможно перепутать
- Строгая каталогизация и наличие деталей
- Инструкция, которую не надо читать (только изображения)
- Отсутствие значимых люфтов и зазоров в конструкциях
- Лёгкость сборки
- Лёгкость профилактики и починки
- Last but not least: свою игрушку собираешь сам, за тебя не трудятся филиппинские дети
- Ещё крепёжных элементов, прозапас
- Детали и запчасти к нему, чтобы можно было заменить при необходимости
- Ещё роботов, разных и сложных
- Идеи, что можно улучшить\приделать\убрать — словом, на сборке игра не заканчивается! Очень хочется, чтобы она продолжалась!
Собирать робота из этого конструктора — не сложнее, чем паззл или «Киндер-сюрприз», только результат гораздо масштабнее и вызываЛ бурю эмоций у нас и окружающих. Отличный набор, спасибо, Даджет!
Вы, наверное, видели множество проектов, основанных на Arduino, которые управлялись через какой-нибудь смартфон. Такие проекты представляли из себя, как правило, вот такую картину: машинка со вставленным в нее Bluetooth-модулем, на который с эмулятора джойстика на телефоне посылаются команды(или что-то в этом роде). Таких штуковин сделано было превеликое множество, и мне пришла в голову такая вот идея. А что, если Arduino поможет Вам на время расстаться с Вашим смартфоном, но при этом продолжать играть в него? Так и родился проект шахматного робота, «мозги» и «глаза» которого сосредоточены в Android-смартфоне. Подробнее — под катом.
Общее представление

Вся эта композиция представляет из себя деревянную коробочку, на которой расположились шахматная доска, манипулятор и кронштейн с подсветкой, на котором лежит телефон. После игры всё выше перечисленное убирается в эту самую коробочку и может без проблем транспортироваться куда угодно, например, в рюкзаке.
Принцип работы здесь следующий. Сверху над доской, на специальном кронштейне устанавливается телефон со специальным приложением, которое с помощью системы компьютерного зрения фиксирует текущее положение фигур на доске. Исходя из того, что система отслеживает все ходы, нет необходимости визуально определять, какая именно фигура стоит в клетке, достаточно знать сам факт её наличия и цвет.
После того, как сделанный человеком ход зафиксирован, эта информация передается шахматному движку, который решает, каким ходом ему надо ответить.
Далее производится вычисление углов для положений, которые роботу предстоит принять, чтобы совершить ход. После чего эта информация отправляется по Bluetooth на манипулятор. Манипулятору остается только принять эту
информацию и сделать ход.
Надеюсь, что читатель этой статьи найдёт здесь что-нибудь интересное для себя. Возможно, кто-то захочет повторить этот проект, или сделать что-то похожее. Сразу хочу сказать, что туториала не будет, так как скопировать эту работу просто по инструкции шаг за шагом не получится, ввиду того что здесь есть много тонкостей, которые можно понять только при попытке реализации. Если Вы захотите посмотреть на чертежи манипулятора, или у Вас возникнут другие вопросы, пишите в личку на GT или в ВК, отвечу бесплатно и по первому требованию.
Программная часть

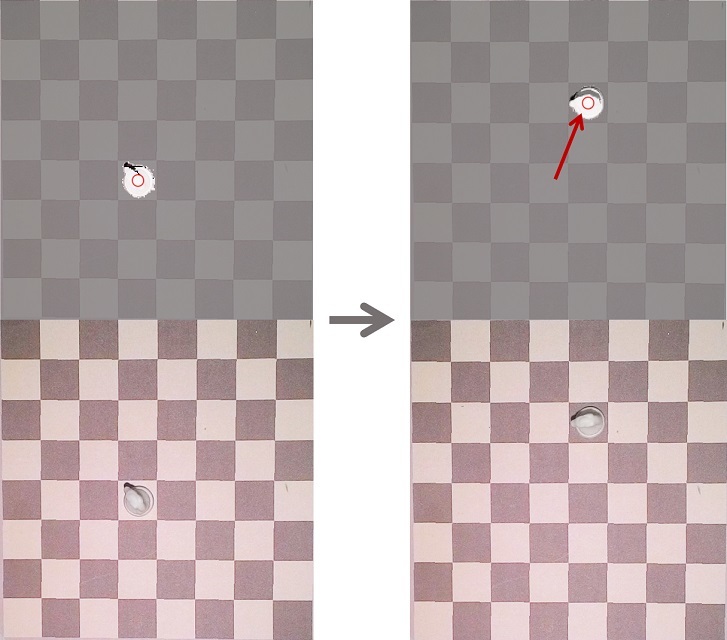
Система технического зрения реализована довольно просто. С ракурса телефона нет особой разницы между, скажем, королём и конём — визуально обе эти фигуры будут выглядеть как чёрные и белые кружки. Поэтому система не знакомится с увиденной ею позицией каждый раз заново, а запоминает последовательность всех сделанных ходов. А сделанный ход определить очень просто: если в какой-то момент времени программа видит, что в одной клетке фигура пропала, а в другой появилась, то это и будет считаться ходом. Примерно так это и работает.
Такой вариант технического зрения реализован исключительно через Android API, без использования OpenCV или чего-то похожего. Это не то чтобы правильно, причина здесь — личный интерес реализовать всё практически с нуля.
Манипулятор
Очень много творческих поисков ушло на то, чтобы придумать такую конструкцию манипулятора, которая может достойно выполнять свою работу с имевшимися у меня в большом количестве дешёвыми китайскими сервоприводами TowerPro sg-90, которые не отличаются высоким качеством работы. Поэтому оба плеча манипулятора выполнены в виде параллелограммов, это позволяет системе захвата фигур всегда оставаться в вертикальном положении. Это, в свою очередь, лишает необходимости добавлять ещё один сервопривод, следовательно, в системе будет меньше погрешностей, позволяет ей быть легкой и более или менее надёжной. Так как шестерёнки тоже сделаны из дерева, то трудно добиться высочайшего качества их работы, поэтому для компенсации люфтов манипулятор перед каждым ходом делает движение в бок, чтобы подходить к каждой точке с одной стороны.
Что касается питания, то его робот его получает от двух плат из обычных зарядок для телефона, которые благополучно расположились в корпусе. Одна зарядка питает сам контроллер вместе с Bluetooth-модулем, другая — непосредственно механику. Для того чтобы сделать освещение, была разобрана светодиодная лампочка. Как оказалось, внутри неё находится две платы: на одной расположились светодиоды, на другой — преобразователь питания. Одна крепится на кронштейне, другая помещается в корпус коробочки. Всё питание выведено на небольшую панельку на боковой стороне корпуса коробочки:

Ещё одна картинка, на которой показана рабочая область манипулятора для отмеченной на нём красной точки. Для нулевой оси диапазон углов составляет 180°.

Сделать такого робота у меня получилось не сразу, некоторые прототипы работали весьма плохо, а некоторые сгодились для другой работы. Например, робот в видеоролике ниже кладёт сахар в кружку и помешивает чаёк.
Система захвата фигур
Особого внимания, на мой взгляд, заслуживает конструкция системы захвата фигур. Самым очевидным решением здесь было сделать две двигающихся навстречу щёчки под управлением сервопривода. Что-то вроде этого:
Как можно понять из рисунка, то для комплекта совсем не больших фигур с диаметром основания 18 мм нужно делать клетку шахматной доски почти в два раза больше, и размер доски также получается неоправданно огромным. После Нескольких неудачных реализаций такого варианта я наткнулся на такую необычную вещь, которая носит название «гибкий цанговый захват»), и выглядит она следующим образом:
То есть это гибкий полый внутри стержень с небольшой металлической подпружиненной клешнёй на конце, которая закрывается, если её сдавить по бокам. А при отсутствии давления клешня мгновенно открывается. Разломав такой захват, на его основе я сделал свою систему захвата фигур. Металлическую клешню сдавливает кольцо, которое прикреплено к зубчатой рейке, приводимой в движение сервоприводом.
Результаты
Работа над проектом продолжается, и результаты тоже постепенно улучшается. На данный момент робот может отыграть партию, не ограниченную количеством ходов, как за чёрных, так и за белых. При этом не будет ошибок ни в работе механики, ни программной части системы. Играет он, кстати, не особо сильно, на уровень третьего разряда, это легко поправляется заменой шахматного движка. Данного робота я демонстрировал на выставке «Архимед-2016», где он практически без остановки играл с разными людьми 6 часов подряд и достойно выдержал такой тест драйв.
На этом всё, надеюсь, вам был интересен этот проект. В нём, конечно есть свои недостатки особенности реализации, так что ещё есть куда стремиться, что совершенствовать и что развивать. Буду рад любым советам, вопросам и пожеланиям в комментариях.
Мы с командой делаем робота для участия в Битве Роботов. Наш робот называется «Большой Брат», и он смотрит на тебя! Смотрит, настигает и разносит вдребезги. Хищный нрав и мощные кинетические орудия делают его идеальной машиной для убийства. Он уже здесь, он рядом — беги!
Это краткая история разработки боевого робота в домашних условиях. Осторожно трафик! Много изображений.

Описание конкурса
Времени очень мало, но мы стараемся изо всех сил.
Ниже представлена информация для конструкторов по созданию роботов-участников боёв Бронебот.
1. Конструкция
- Тяжелый класс: 100 кг.
- Средний класс: 50 кг.
- Легкий класс: 17 кг.
- Тяжелый класс: 1.5 х 1 метров в длину и ширину.
- Средний класс: 1 х 0.75 метров в длину и ширину.
- Легкий класс: 0.5 х 0.5 метров в длину и ширину.
- Высота не ограничена.
1.4. Роботы должны быть оснащены тумблерами ВКЛВЫКЛ в части, отдаленной от оружия, полностью отключающими питание всех подсистем робота. Если тумблеров несколько, они должны находиться рядом. Тумблеры могут быть спрятаны под оболочкой, но должны быть доступными без переворачивания робота или разборки с помощью инструментов.
1.5. Летающие роботы запрещены.
2. Электричество
2.1. Напряжение питания роботов не должно превышать 36 Вольт.
2.2. Все электрические соединения должны сделаны качественно и на должном уровне изолированы. Кабели должны быть проложены с минимальным шансом быть разорванными.
2.3. Аккумуляторы должны быть полностью изолированные и не содержать жидкостей. Соединения аккумуляторов должны быть полностью изолированными.
2.4. Двигатели внутреннего сгорания запрещены.
3. Гидравлика
3.1. Давление в гидравлических линиях не должно превышать 204 атм (3000 psi/20.4 mps).
3.2. Гидравлические жидкости должны находиться в надежных емкостях внутри робота. Все гидравлические линии должны быть проложены с минимальным шансом быть поврежденными.
4. Пневматика
4.1. Давление в пневматеческих линиях не должно превышать 68 атм (1000 psi/6.8 mps).
4.2. Пневматические емкости должны быть подлежащего качества, промышленного производства. Давление в них должно соответствовать спецификации производителя.
4.3. Пневматические емкости должны быть закреплены внутри робота и защищены от повреждений.
4.4. Газы для пневматики должны быть невоспламеняющимися или инертными, например, воздух, углекислый газ, аргон, азот.
4.5. Должна быть предусмотрена возможность спустить давление в системе без разбора конструкции.
5. Оружие
5.1. Каждый робот должен быть оснащен минимум одним активным оружием.
- Пиротехника
- Огнеметы
- Жидкости
- Едкие вещества
- Неуправляемые снаряды
- Электрошокеры
- Радиоглушители
- Тепловые пушки
- Гауссганы
- Любое оружие, использующее горящие или воспламеняющиеся газы
5.4. Вращающие диски из закаленной стали и лезвия, которые при поломке образовывают осколки, запрещены.
5.5. Длина лезвийштыков не должна превышать 20 см.
5.6. Все подвижные манипуляторы, даже не содержащие оружия, должны иметь фиксирующие крепежи. Крепежи должны быть закрытыми во всех случаях, кроме нахождения робота на арене или техобслуживании.
5.7. Все острые грани и элементы оружия должны иметь крышки или насадки. Эти элементы не учитываются при взвешивании.
6. Радиоуправление
6.1. Используемые частоты должны быть разрешены законодательством РФ.
6.2. Робот не должен обладать автономностью. Все управление должно осуществляться исключительно с пульта оператора.
6.3. Все системы роботов должны быть отключаться при потере управляющего сигнала.
6.4. Стабильность управления должна быть продемонстрирована Организаторам заранее для допуска к участию.
6.5. Для избежания конфликтов частоты между роботами участники должны иметь два набора “передатчик-приемник”, работающих на разных частотах.
Арена

Бои будут проходить на специальной пуленепробиваемой сцене 10х10 метров со скошенными углами, т.е. фактически это восьмиугольник.

Другие роботы
Большинство роботов имеют богатый опыт участия в соревнованиях, но это только делает задачу выиграть у них еще интересней.
Наша команда

- Вячеслав Голицын
- Александр Егоров
- Андрей Такташов
- Дмитрий Елисеев
- Павел Поздняков
Краткое описание робота
- Низкий центр масс
- Низкий клиренс
- Возможность повернуться в случае переворота
- Возможность опрокинуть соперника
- Геометрия корпуса как пассивная защита.
Так же из фич: Отделяемая часть робота, и пилы.
Каркас, форма, сборка
Разрезаем профиль





Колеса со строительного рынка

Двигатели
У нас была очень большая надежда на шаговые двигатели Nema 43. По заявленным характеристикам они нам подходили, мы варили под них раму. При подключении оказалось, что справится с какой-либо нагрузкой они не смогут. В срочном порядке пришлось искать другое решение. Мы нашли двигатели 36В 500Вт и уже переделали раму под них.
Радиоуправление
Обработкой ШИМ-сигнала с пульта занимается Arduino (Душа моего робота-газонокосилки). Проблема с обработкой заключалась в том, что на подсчет ШИМ-сигнала с 8 каналов уходит много времени. Выполняя это в основном цикле программы, оказывалось невозможно отправлять на драйверы двигателей адекватное количество пульсов для движения. Решением было выведение работы с шаговиками в функцию запускаемую по таймеру и изменением параметров таймера в основном цикле. Сейчас уже оказывается все это не нужно, коллекторными двигателями мы управляем через драйвер, на который будем подавать ШИМ, который смело можно изменять в основном цикле программы.

Пневмосистема
Пневмосистема в разборе:

Главной идеей было использовать для каждого двуходового цилиндра по 4 клапана, которые перекрестно соединены. Когда мы открываем клапан для наполнения цилиндра с одной стороны открываем для стравливания клапан с противоположной стороны.
Для управления клапанами решили использовать такой модуль с 8 реле, которых как раз хватает для 16 попарно-соединенных клапана, т.е. для 4 цилиндров.


Орудия
Главный молот. Над дизайном главного молота-кирки думаем и спорим.

В качестве пил мы решили использовать двигатели кошения и ножи от Robomow. Во-первых ножи сделаны из прочной стали, а двигатели дают хороший момент и количество оборотов. Во-вторых Robomow согласились нас спонсировать ими.
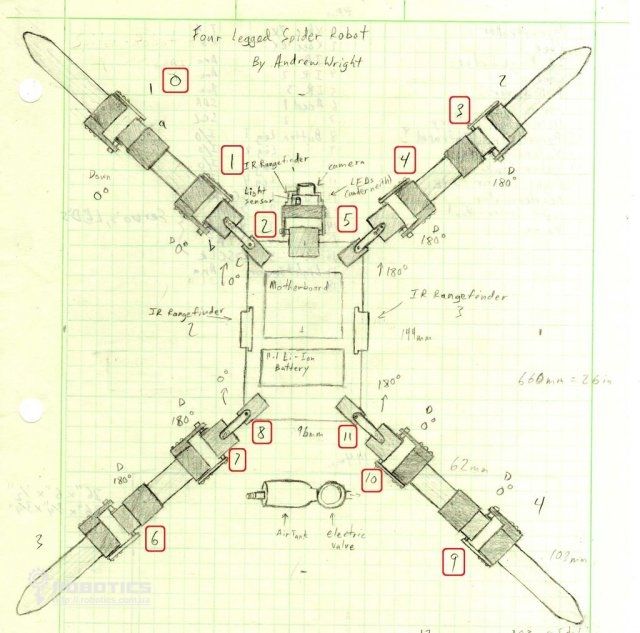
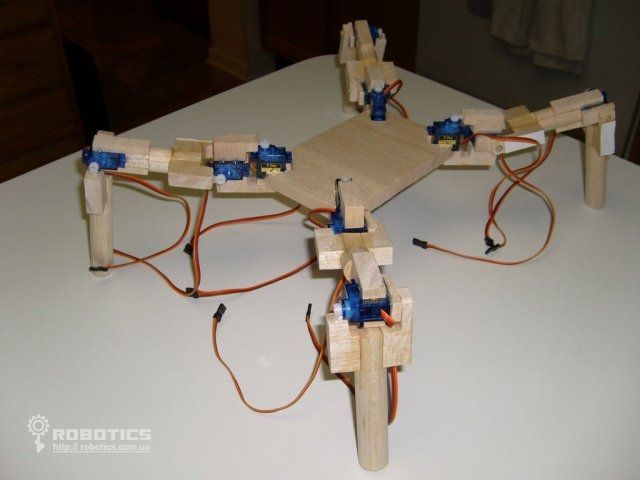
Материалы и инструменты для создания робота:
- 12 сервоприводов типа Tpro – SG90;
- дерево бальза Rectangle (36 x 6 x ½ дюймов), Dow (36 х 3/3 дюймов), Dow (12 x 1/8 дюймов);
- схема Arduino типа Uno;
- двигатель типа PWM – TLC5940;
- 14 резисторов номиналом 4,7К, 1,7 К, 10К Ом;
- конденсатор на 10 uF;
- разъем 538 – 42375 – 1856 (папа);
- плата типа Protoboard 589 – 8200 – 4565;
- аккумулятор 6 Вольт, емкостью 5000mAh (наличие не обязательно);
- 30осный акселерометр типа ADXL345.

Необходимые инструменты:
- сверло размером 1/8;
- нож с острым лезвием;
- термоклей и столярный клей;
- паяльник.
Вот этого набора инструментов и материалов будет достаточно, чтобы создать робота. Без доставки все элементы суммарно обойдутся не более чем в 100$.
Если есть желание сэкономить, то на робота можно не устанавливать батарею, его можно запитать через блок питания на 5-6В.
Чтобы роботу было легче поддерживать равновесие, на него устанавливают акселерометр, но здесь уже будут нужны особые навыки в плане программирования.
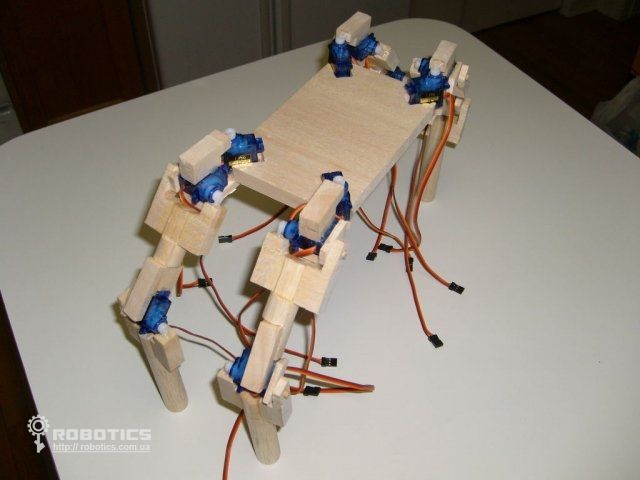
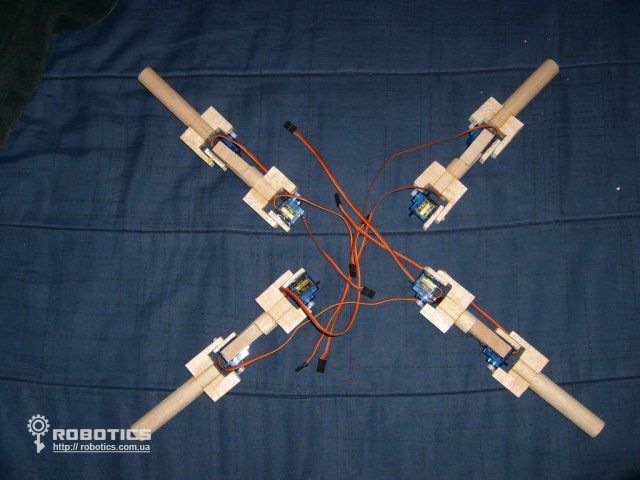
Шаг первый. Как сделать тело робота
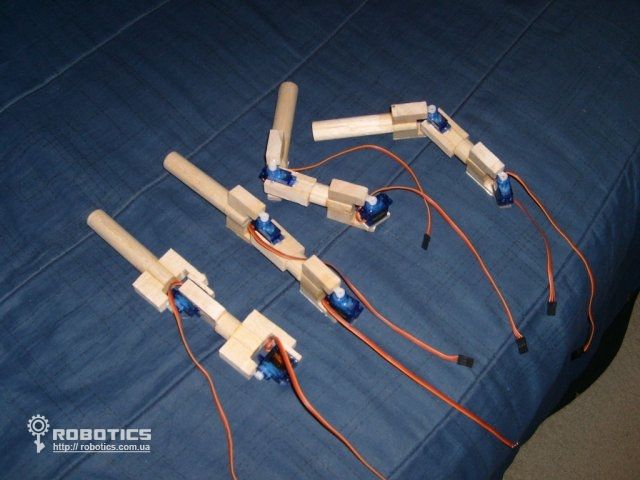
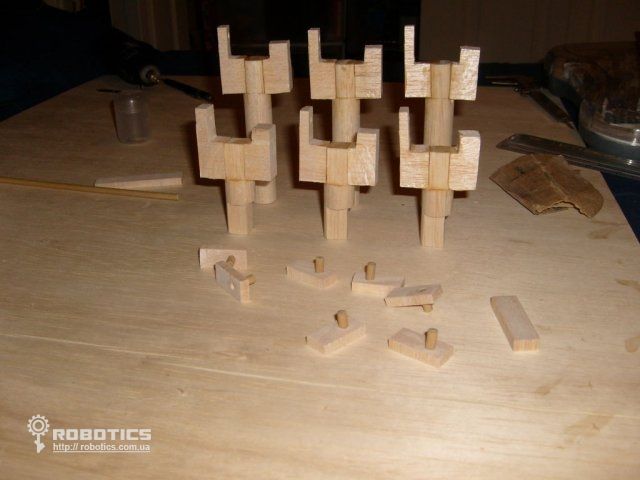
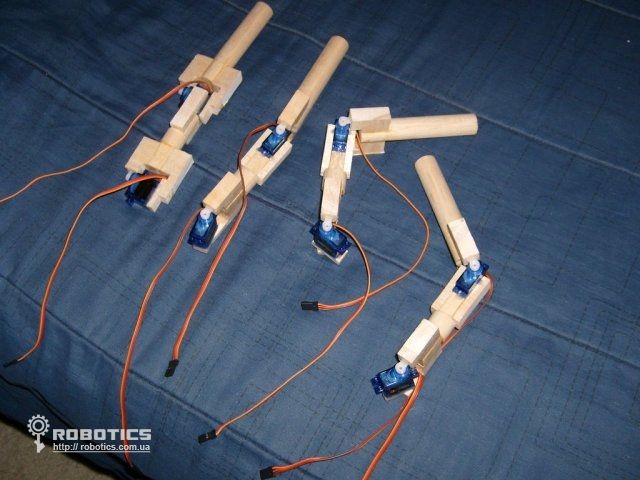
Самым сложным элементом робота является нога. Главное, сделать сперва одну, а затем сделать все четыре не составит труда.
Для работы с пробковым деревом нужен лишь один инструмент - нож. Работать лучше всего за столом, тогда получится получить более последовательные и параллельные разрезы.
Чтобы сделать первую ногу робота, нужно посмотреть, как она должна выглядеть. Для этого автор прилагает фото с различными вариантами изготовления ног робота. Особое внимание при изготовлении ног нужно уделить точкам опоры.
Еще на рисунках можно увидеть контакты сервоприводов. Они нужны для того, чтобы укрепить ноги и снизить нагрузку на валы серводвигателей.
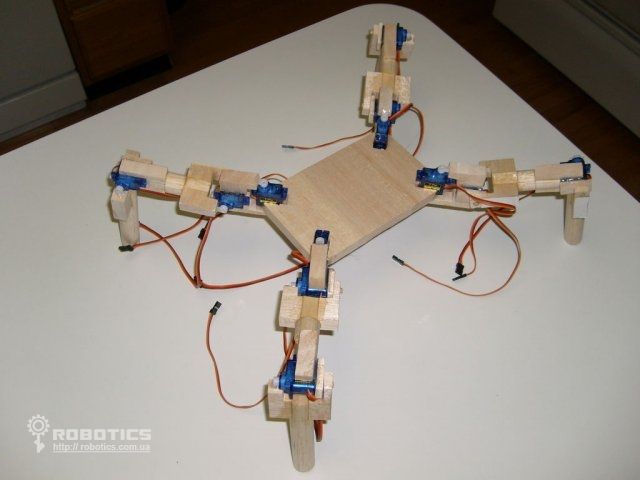
Если говорить о животе робота, то это прямоугольник, который имеет выемки по краям для установки сервоприводов.
Для склеивания бальзы лучше всего использовать столярный клей, он обеспечивает надежную прочность соединения. Еще столярный клей можно нанести на внешнюю часть древесины, чтобы сделать материал прочнее.
Чтобы прикрепить сервопривод к дереву используется горячий клей. Но практика показывает, что такое соединение может быть не надежным, поэтому здесь желательно подумать и каким-то иным образом фиксировать сервопривод.
Особенность предложенного проекта робота в том, что ноги могут выгибаться на 180 градусов, благодаря этому робот может ходить вверх ногами.


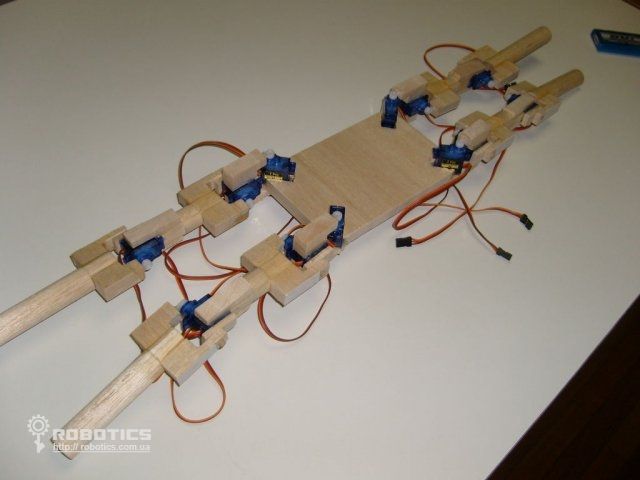

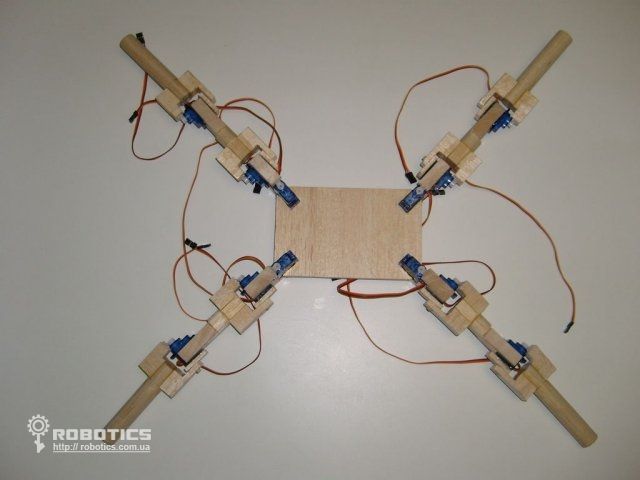
Шаг второй. Как устроена электронная часть робота
Изначально схема имела огромный функционал, но проще она была упрощена и теперь перед ней стоит лишь одна задача - заставить робота шагать. Если в бюджете имеется некий запас средств, систему можно добавить акселерометром. Здесь он будет являть отличным дополнением.
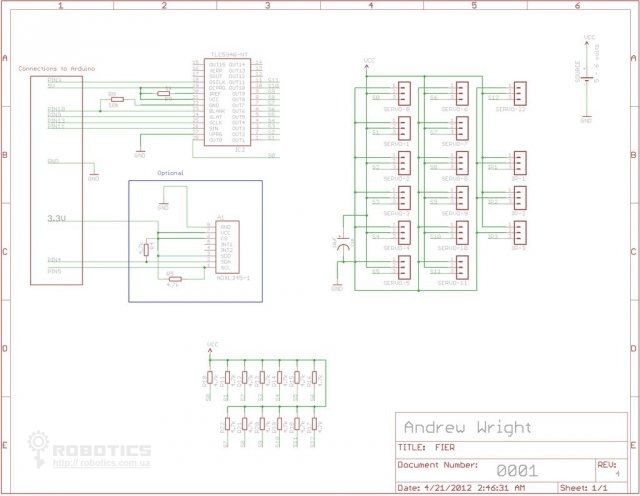
Если взглянуть на схему, то можно увидеть источник питания на 5-6 Вольт. Это основной источник питания для робота, этого вполне хватает для его нормальной работы. Для питания сервоприводов не нужно использовать источник питания от Arduino. Нужно использовать источник питания Arduino только для питания мотора PWM.
Для размещения всех элементов лучше всего создать печатную плату. Не лишним здесь будет передатчик PCB Advanced Circuits, так как проект часто преподносят в виде примера в школах.
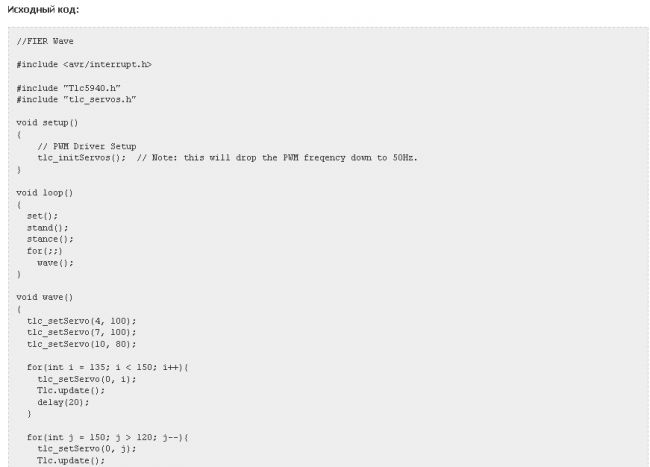
Шаг третий. Программный код робота
Ниже можно скачать готовую прошивку для робота. Если самоделка собрана правильно, то при запуске робот должен подняться и начать покачивать лапой.
Для установки кода для работы понадобятся драйвера TLC5940, их можно скачать на этом сайте .
Теперь робот готов и его можно тестировать. При запуске он будет очень интересно передвигать ногами подобно пауку. В качестве апгрейда на робота можно установить камеру, различные датчики и прочие элементы, которые значительно помогут расширить его функционал и возможности.
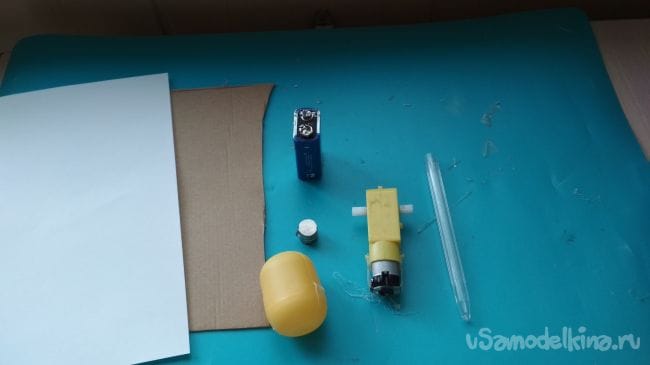
И так для данного робота нам понадобится:
-мотор редуктор
-картон
-бумага
-источник питания на 3,7-9 вольт (в начале я использовал крону, но из-за нехватки мощности пришлось заменить на аккумулятор типа18650)
-трубочки от ручки
-неодимовые магнитики
-провода
-выключатель
-баночка от киндера
Из инструментов нам также понадобится:
-термо клей
-паяльник
-ножницы
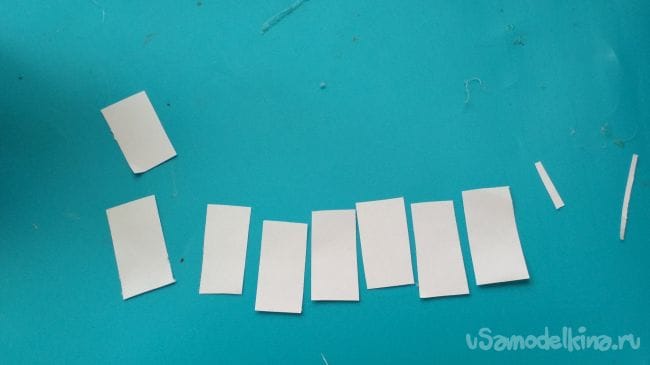
И так первым делом нужно вырезать из картона восемь равных по размеру кусочки, 4 см в длину и 1,5 см в ширину:






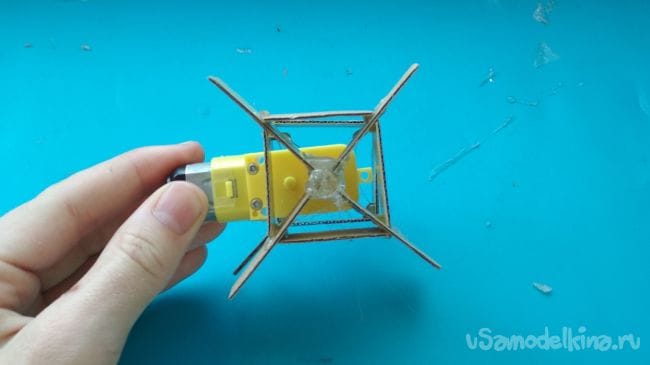


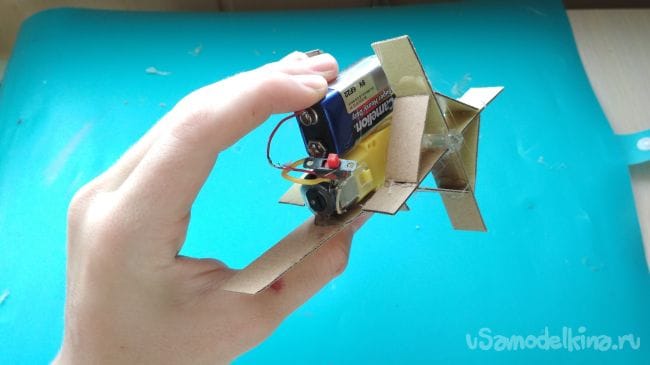
Берём баночку от киндера и отрезаем от неё крышку, затем делаем два небольших надрезов и загибаем так как показано на фото, это нужно для того чтобы крышка лучше приклеилась к картонке


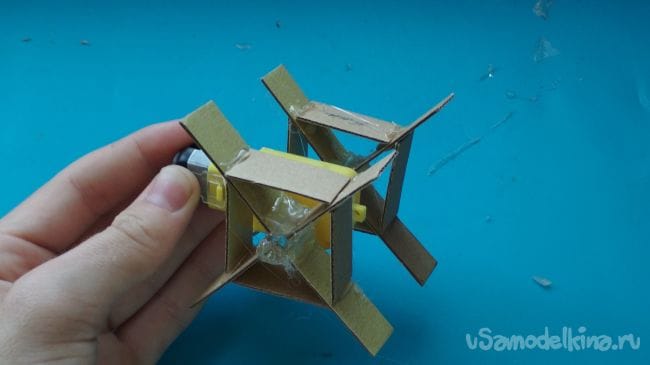
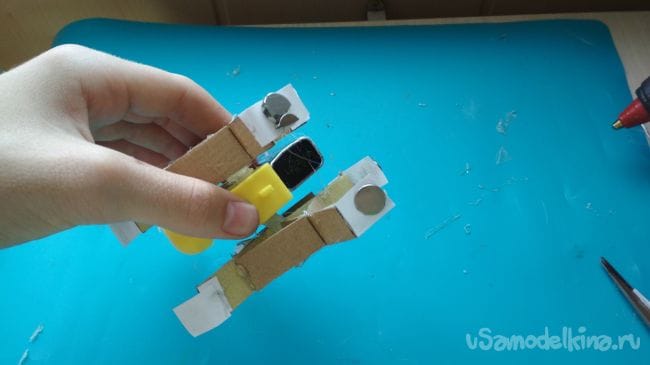
Нарезаем из бумаги 8 примерно равных кусочка по 4-5 см (на фото они меньше так как я сделал ошибку и в первой модели данного робота сделал отрезки по 2 см и потом просто приклеил магниты к ним, но из-за того что магниты были открытые, они просто примагничивались к поверхности, а затем отрывались, так что я придумал делать некое подобие "конвертиков" из бумаги в которые клались магнитики, затем наши "конвертики" нужно приклеить к каждому выступу "колёс" так как показано на нижних фото)




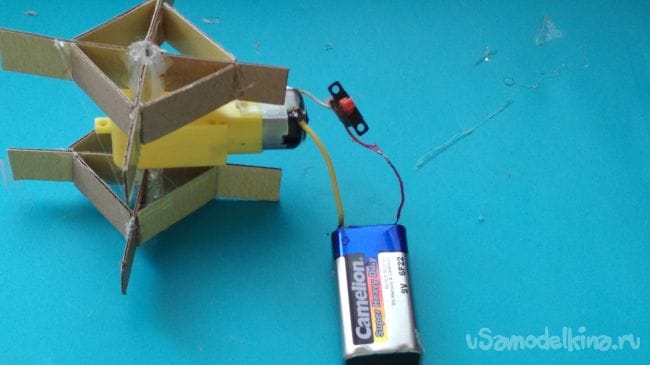
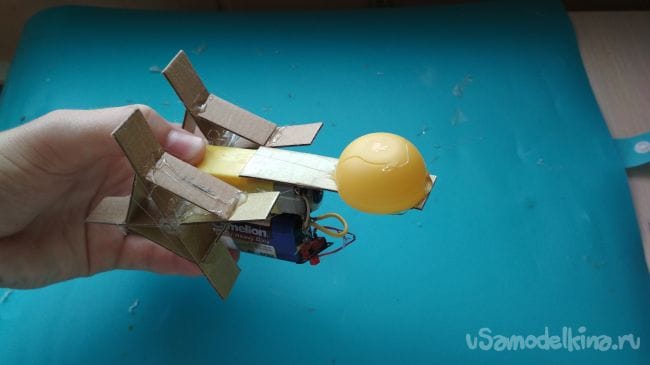
Проведя несколько испытаний стало понятно что кроны не хватает и нужно что то по мощнее, поэтому я поменял крону на аккумулятор 18650, но его главный минус это то что он слишком тяжёлый, поэтому в идеале использовать небольшие аккумуляторы, на подобе тех что стоят в квадрокоптерах и радиоуправляемых самолётах

Ну вот и всё, наш робот "стенолаз" готов и осталось только его протестировать! Данный робот из-за тяжести аккумулятора двигается по стене очень медленно, но двигается! К тому же он довольно шустро передвигается по земле, думаю такая игрушка понравится детям.
Читайте также: