
Датчик отрыва от пола
Обновлено: 30.04.2024
Назначение IR (инфракрасного) датчика движения
Датчик движения служит двум целям.
- 1 назначение датчика движения – экономить электроэнергию при освещении помещений и объектов. Свет горит только тогда, когда в этом есть необходимость.
- 2 Сигнализация и имитация присутствия. Установленные скрытно у дверей и окон, датчики включают оповещение для хозяев или освещение для имитации, что “кто-то есть дома”.
Датчик движения – инфракрасный (тепловой) датчик, который обнаруживает перемещение живых объектов и управляет освещением. В датчике движения используется в качестве сенсора пироэлектрический датчик, принцип работы которого основан на повышении напряжения на его выходе при повышении уровня инфракрасного излучения по сравнению с фоновым.
Для включения света используется внутреннее реле датчика.
Применение
Инфракрасные датчики движения устанавливают для “умного дома” и экономного включения света в местах общего пользования – лестничные площадки, подъезды, дворы. Дома и в квартире ИК-датчики устанавливают в коридорах, туалетах , кладовках, подвалах, погребах.
Применяются ИК-датчики в местах, где освещение требуется только в присутствии людей, но ставить обычный выключатель не целесообразно.
Параметры IR датчиков движения
- Напряжение питания – 9 - 12 - 36 В DC - 220 – 240 В, 50 Гц. АС
- Таймер задержки и выдержки – от 3 секунд до 10 минут. Время, в течение которого свет будет гореть после срабатывания датчика можно установить регулятором.
- Светочувствительность – от 0,5 до 150 Люкс. Параметр показывает, при какой внешней освещенности работает датчик. При установке освещенности до 100 Люкс прибор будет работать только ночью. Устанавливается переключателем или регулируется плавно.
- Дистанция обнаружения объектов – до 15 метров.
- Скорость срабатывания – от 0,5 до 1,5 м/с. Если объект перед датчиком будет двигаться очень медленно, датчик не сработает, и объект уйдет из зоны охвата. То же произойдет и при быстром движении.
- Максимальный коммутируемый ток . В датчиках применяется в основном электромагнитное реле, которое и определяет мощность нагрузки. Бытовые датчики в основном выпускаются на ток от 300 до 2500 Вт. служат для коммутации старого типа осветительных приборов.
- Угол обзора . В потолочных датчиках этот угол обычно равен 360 градусов. Но при этом очевидно, что зона охвата будет определяться и высотой. Настенные датчики имеют угол обзора от 120 до 180 градусов.
ВСЁ ЧТО ВЫШЕ НАПИСАНО ВЫ МОГЛИ ПРОЧИТАТЬ В СЕТИ И БЕЗ МЕНЯ ПРОСТО ИЗ ИНСТРУКЦИИ !
Принципы работы фотодатчиков разного исполнения меня конечно сильно интересуют, а особенно те, что срабатывают на движение. Именно по этому я регулярно пытаюсь читать статьи про ДАТЧИКИ ДВИЖЕНИЯ публикуемые в разных местах в сети и журналах.
И, если старые журналы еще хоть как то старались реально описывать принципы работы подобных устройств, то с овременные авторы (блогеры) просто переписывают инструкции к утюгам и самоварам .
Уверен, что , если вы прочитали то что написано выше, Вы ничего не поняли о принципах работы ДАТЧИКА ДВИЖЕНИЯ ! Таких статей в которых, вместо описания работы ПИР (PIR) датчиков, Вам уважаемый читатель "втюхивают" информацию о простейших датчиках приближения , паяемых десятками школьниками и "учениками младшей группы детсада".
Принцип работы Датчика приближения - Излучающий IR светодиод светит в направлении объекта и отраженный от объекта ИК свет, попадая на фотоприемник IR фотодиод, заставляет срабатывать схему с реле включающим сирену или лампу.
Сделать подобное устройство можно самостоятельно весьма просто и даже очень оригинально - например из SIM карты или Кредитки
И вот мне жутко интересно ПОЧЕМУ вместо толкового описания принципов работы ДАТЧИКОВ ДВИЖЕНИЯ мне предлагают почитать о том что .
Кстати, если зимой мимо датчика пройдет хорошо одетый человек, датчик может его и “не заметить”, хотя в теплое время сработает четко. Это можно объяснить тем, что окружающая температура и температура одежды человека почти равны.
Может быть действительно информация о том что "Компьютерная Мышка это примитивная видеокамера" или что "SIM карта это диод для детекторного приемника" и фотографии развинченного фотореле гораздо познавательнее и полезнее ? чем реальные принципы работы современных приборов и их реальное применение и модернизация !
Упакован робот и все к нему в относительно большую коробку из гофрированного картона.

Содержимое коробки защищают вставки из пенопласта. Пластиковая ручка сверху облегчает транспортировку покупки. В комплекте поставки есть все необходимое, чтобы сразу после зарядки начать использовать робота.

Робот является продолжением линейки автоматических полотеров компании Everybot. В сравнении с предыдущей моделью RS500 новинка имеет другое цветовое решение, немного ниже и — самое главное — оснащена инфракрасными датчиками приближения к препятствиям.
Согласно нашим измерениям, высота в снаряженном состоянии составляет 110 мм, что сравнимо с высотой типичного робота-пылесоса. Длина равна 371 мм, а ширина 203 мм. Габариты робота определяют минимальный просвет от пола предметов обстановки, под которые он может забраться, и доступность для него узких проходов. Весит робот 2152 г без учета залитой воды. Корпус робота в основном изготовлен из черного пластика без покрытия, но есть и радующие глаз элементы из оранжевого пластика также без покрытия. Углубление сверху под ручкой имеет зеркально-гладкую и очень маркую поверхность. Вообще преимущественно темный цвет корпуса — это не очень хорошее решение для перемещающегося по полу робота. Спереди и сзади есть вставки из прозрачного тонированного пластика с зеркально-гладкой поверхностью.

Перемычка сверху образует ручку, за которую робота удобно переносить, и за которую его держит пользователь в режиме ручной уборки.

Снизу на ручке есть углубления под пальцы, поэтому робот из руки не выскальзывает. Сверху на ручке — планка из пластика с поверхностью под неполированный металл, на которой следы от пальцев заметны несильно. Боковые поверхности с заходом вперед и назад огибают два высоких бампера.

Бамперы изготовлены из жесткого плотно тонированного, но прозрачного для ИК-света пластика. Снаружи они имеют упругое, напоминающее резину, покрытие черного цвета. Это покрытие предохраняет бамперы и мебель от повреждений при столкновениях. Бамперы закреплены на подпружиненных подвесках, а сдвиг бампера при столкновении вызывает срабатывание датчиков препятствий. За узкими продольными окошками на бамперах располагаются ИК-датчики препятствий.

Сверху, в той части, которую для определенности можно назвать передней, есть механическая кнопка запуска и остановки уборки. Кнопка изготовлена из молочно-белого полупрозрачного пластика и имеет рисунок из черной матовой краски в виде треугольника в треугольнике. Кнопка в зависимости от состояния робота подсвечивается синим, желтым или красным. Во время зарядки кнопка мигает раз в две секунды желтым при низком уровне и синим при заряде выше 70%, при достижении полного заряда подсветка кнопки гаснет. Это очень неудобный способ индикации, так как нужно долго смотреть на робота, чтобы определить его состояние, и окончание зарядки никак не отличить от состояния, когда по какой-то причине внешнее питание не подается. При нормальной работе кнопка подсвечивается синим, непосредственно перед окончанием работы из-за разряда аккумулятора и при ошибке кнопка мигает желтым. Дополнительно о некоторых изменения в состоянии робот информирует с помощью негромких звуковых сигналов (запуск и остановка уборки, окончание зарядки, ошибка). Сверху сзади есть оптический датчик, состоящий из ИК-диода и ИК-приемника. С помощью этого датчика робот определяет, не находится ли он под мебелью в тот момент, когда уборка завершается, и если да, находится, то робот старается выбраться на открытое пространство, чтобы пользователю проще было робота обнаружить. ИК-приемник, видимо, также принимает сигналы от пульта дистанционного управления. Внизу в задней части есть разъем для зарядки аккумулятора работа.

Длина кабеля внешнего адаптера питания составляет 115 см. Также заряжать робота можно на базовой станции, которая будет доступна в виде дополнительного аксессуара или в варианте с расширенной комплектации. База, конечно, повышает удобство использования. Вот изображение базы, предоставленное производителем:

Аккумуляторная батарея находится под крышкой на днище. Батарея составлена из трех элементов форм-фактора 18650.

На днище находятся клавиша питания, крышка отсека аккумулятора с наклейкой, контактные площадки для зарядке на базе и два диска. ИК-датчики перепада высоты, благодаря которым робот может избежать падения со ступенек, находятся, по всей видимости, за ребрами бамперов.

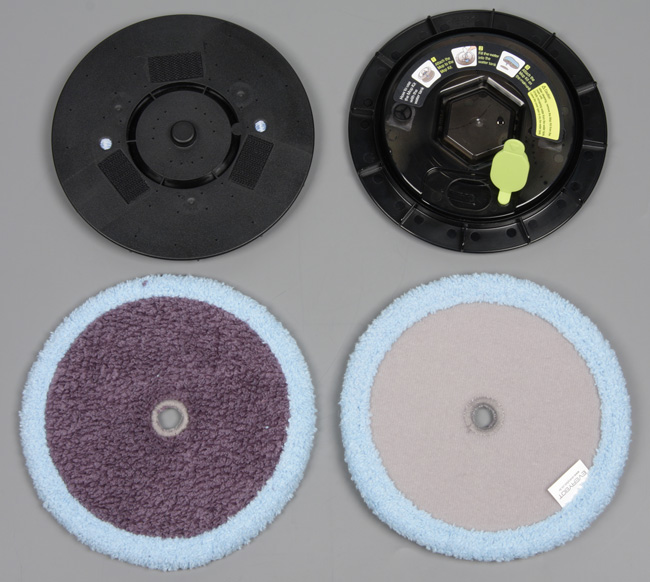
Диски оснащены электрическими приводами и могут вращаться независимо друг от друга. На эти диски закрепляются круглые площадки для протирочных салфеток. А уже на эти площадки на липучках фиксируются сами протирочные салфетки.

Оси приводов относительно перпендикуляра к днищу немного наклонены так, что края дисков в центре робота чуть приподняты относительно пола, поэтому в рабочем состоянии робот сильнее прижимает края салфеток в передней и задней части корпуса. В итоге передняя и задняя часть робота движется в направлении противоположном вращению соответствующего диска. По крайне мере, это правило выполняется на достаточно ровном плоском полу и если сцепление дисков с полом одинаковое. Если оба диска вращаются в разных направлениях с одинаковой скоростью, то робот движется боком, а если диски вращаются в одну сторону — то робот вращается на месте. Если скорости вращения дисков различаются, то робот движется по дуге. Прямо вперед или назад робот двигаться не умеет.
Перед началом уборки салфетки нужно хорошо смочить водой и отжать, а потом закрепить на площадках так, чтобы центральное отверстие в салфетке совместилось с выступом в центре площадки.

Для поддержания салфеток во влажном состоянии, в емкости на площадках нужно залить воду, и закрыть заливные отверстия заглушками из упругого пластика. В эти емкости вмещается примерно 60 мл воды. Отметим, что заливать нужно именно чистую воду.

Для варианта сухой уборки, или когда нужно убрать с пола остатки жидкости, смачивать салфетки и заливать воду в резервуары, разумеется, уже не требуется. Салфетки изготовлены с использованием микроволокна. Они относительно толстые и могут удерживать существенное количество жидкости. Верхний впитывающий слой волокнистый. А снизу мягкая бахрома чередуется с щетинками, помогающими оттирать грязь с пола. Периметр салфеток окаймлен бахромой оранжевого цвета.
Вода на салфетки поступает через два отверстия в площадках, при этом специальная система обеспечивает более-менее равномерную скорость подачи воды на салфетки. По окончании уборки нужно снять площадки с салфетками, вылить остатки воды из резервуаров, оставить площадки сохнуть с открытыми заглушками, а салфетки вымыть и высушить. Салфетки можно стирать в стиральной машине при 40 градусах, отжимать и сушить при нормальной температуре.
К роботу прилагается небольшой ИК-пульт ДУ. Его корпус пластиковый, черный и зеркально-гладкий снаружи. Кнопки изготовлены из резиноподобного материала.

Основной режим уборки — автоматический. В этом режиме робот самостоятельно перебирает несколько вариантов движения. Запускается автоматический режим или кнопкой на корпусе робота, или красной кнопкой запуска/остановки на пульте. Останавливается уборка теми же кнопками. Только с пульта пользователь может включить режим локальной уборки, заставить робота 20 минут двигаться только вдоль стен и других препятствий, выбрать Y-образную траекторию движения и режим сухой уборки. В любом режиме с пульта можно включить/выключить увеличенную скорость движения. Нажатие на кнопки вправо или влево на пульте, заставляет робота вращаться на месте по или против часовой стрелки, а кнопки вперед или назад отвечают за прямолинейное движение робота одним или другим боком. Робота можно использовать в ручном режиме, держа его в руках и прижимая к очищаемой поверхности. Ручной режим включается долгим нажатием на кнопку на корпусе робота, при этом датчики отрыва от пола блокируются. Робот не очень тяжелый, поэтому рука не будет быстро уставать при чистке вертикальных поверхностей. Изготовлен робот в Корее. Компания-производитель имеет официальное представительство в России, есть и официальные сервисные центры в регионах России.
Тестирование
Тестирование этого робота для протирки полов было несколько поверхностным, так как у нас нет ни соответствующей методики, ни подходящего для серьезных тестов помещения. На пробу мы запускали робота в нескольких помещениях с линолеумом на полу. Видео ниже демонстрирует начало уборки в одном из помещений.
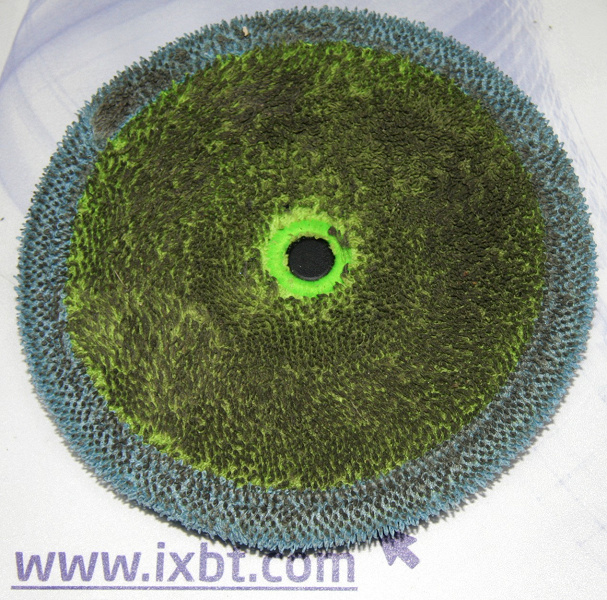
Робот никак не ориентируется в пространстве и не строит карту, его перемещение имеет условно случайный характер. Во время выполнения большинства вариантов движения при приближении к препятствиям, которые робот определяет дистанционно, или при столкновении с ними, если ИК-датчики препятствие не определяют (черные матовые поверхности и ножки столов и стульев), робот меняет направление движения, но в режиме уборки вдоль стен робот обязательно движется вплоть до касания препятствий. Робот объезжает черный коврик, видимо, ориентируясь на датчики отрыва от пола. Увлажнение пола умеренное, через несколько минут след за роботом уже высыхает (но влажность в помещении скорее была низкой). Поэтому этого робота можно использовать для уборки всех видов гладких полов, включая невлагостойкий ламинат, паркет и дощатые полы. В наших условиях вода в резервуарах заканчивалась примерно на 45-й минуте работы, при этом бо́льшую часть времени влажный след шел двумя полосами с сухим промежутком в центре. Через 50 минут работы в автоматическом режиме влажной уборки робот останавливается, и как раз к этому времени можно заменить протирочные салфетки и долить воды в резервуары. Напомним, что с помощью оптического датчика робот определяет наличие препятствия сверху, и, если он оказывается под мебелью в конце цикла уборки, то он старается выбраться на открытое пространство, чтобы пользователю проще было его найти. От одного заряда аккумулятора робот отработал два цикла по 50 минут и еще 10 минут. В конце первого цикла уборки салфетки приобрели вот такой вид:

Грязи с салфеток смывается много, также салфетки хорошо собирают мелкий мусор, волосы, нитки и прочее. Однако лучше предварительно очистить пол от мусора, например с помощью робота-пылесоса. Вручную отстирать салфетки непросто, но стирка в стиральной машине придает им практически изначальный вид.
Видео ниже демонстрирует режимы «Сухая уборка», «Вдоль стен», «Ручное управление», «Y-режим» и «Локальная уборка»:
Заряжается робот относительно быстро, в наших тестах за 1 час 23 минуты:

Во время зарядки потребление достигает порядка 17 Вт, заряженный и подключенный к сети робот потребляет около 1,4 Вт, адаптер, не подключенный к роботу — примерно 0,16 Вт.
Робота нельзя назвать тихим. В основном звук — это работа электрических приводов, их завывание громкое и весьма раздражает. Уровень шума зависит от скорости и траектории движения. С расстояния порядка 1,2 м над роботом наши замеры показали следующее:
| Режим | Уровень шума, дБА |
|---|---|
| Локальный | 63,6–66,8 |
| Локальный, высокая скорость | 65,2–70,3 |
| Прямолинейное движение | 67,5 |
| Прямолинейное движение, высокая скорость | 74,1 |
Для сравнения, уровень шума в этих условиях обычного (не самого тихого) пылесоса равен примерно 76,5 дБА.
Выводы
Как и в случае предыдущей модели, учитывая впитывающую способность салфеток, их рабочую поверхность с бахромой и щетинками, то, как салфетки вращаются и прижимаются, а также хорошее увлажнение пола, стоит ожидать, что этот робот справится с влажной уборкой пола лучше, чем роботы-пылесосы с протирочными насадками или даже специализированные роботы-полотеры, которые не так активно воздействуют на убираемую поверхность. Тут ничего не изменилось, но робот стал ниже, так что в общем случае ему стала доступна площадь под теми предметами, куда RS500 не мог забраться. Кроме того, у новинки появились ИК-датчики приближения, и теперь робот с меньшей вероятностью ударяется о мебель на высокой скорости. В итоге к значимым недостаткам Everybot RS700 можно отнести разве что высокий уровень шума.
Everybot RS500 оснащен двумя вращающимися насадками из микроволокна, которые поддерживаются во влажном состоянии. Увлажнение пола умеренное, поэтому этого робота допустимо использовать на всех типах гладких полов. В автоматическом режиме он сам перемещается по полу, а в ручном режиме, держа робота в руке, можно чистить горизонтальные и вертикальные поверхности. Работает Everybot RS500 от аккумулятора, обеспечивающего автономность в течение примерно одного часа.
Содержание:
Видеообзор
Для начала предлагаем посмотреть наш видеообзор робота-полотера Everybot RS500:
Теперь давайте взглянем на спецификации устройства.
Паспортные характеристики, комплект поставки и цена
- Робот-полотер
- Адаптер питания (100—240 В, 50/60 Гц на 14 В, 1,5 А)
- Комплект многоразовых салфеток, 4 шт.
- Основания для салфеток, 2 шт.
- ИК-пульт ДУ и два элемента питания типа AAA для него
- Защитные накладки на бампер, 4 шт.
- Руководство пользователя
Внешний вид и функционирование
Упакован робот и все к нему в относительно большую коробку из гофрированного картона.

Содержимое коробки защищают вставки из пенопласта. Пластиковая ручка сверху облегчает транспортировку покупки. В комплекте поставки есть все необходимое, чтобы сразу после зарядки начать использовать робота:

Формой робот напоминает плод арахиса с двумя семенами.

Робот относительно высокий, согласно нашим измерениям 141 мм в высоту в снаряженном состоянии, при этом длина составляет 369, а ширина 201 мм. Габариты робота определяют минимальный просвет от пола предметов обстановки, под которые он может забраться, и доступность для него узких проходов. Весит робот 1886 г без учета залитой воды. Корпус робота изготовлен из белого пластика без покрытия. Верхняя часть зеркально-гладкая, а нижняя матовая.
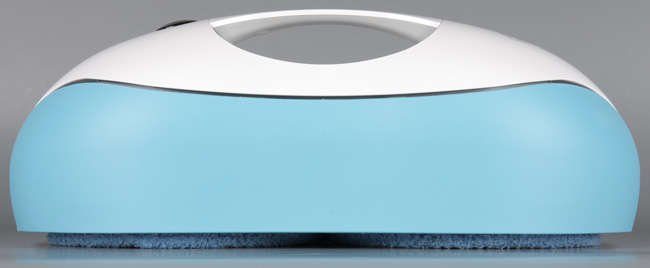
Перемычка сверху образует ручку, за которую робота удобно переносить, и за которую его держит пользователь в режиме ручной уборки. Снизу на ручке есть вставка из серого пластика со слегка шершавой поверхностью, поэтому робот из руки не выскальзывает. Боковые поверхности с заходом вперед и назад огибают два высоких бампера.

Бамперы изготовлены из жесткого черного пластика, но снаружи они имеют упругое, напоминающее резину, покрытие голубого цвета. Это покрытие предохраняет бамперы и мебель от повреждений при столкновениях. Для дополнительной защиты на бамперы можно наклеить поролоновые накладки с клеевым слоем, входящие в комплект поставки.
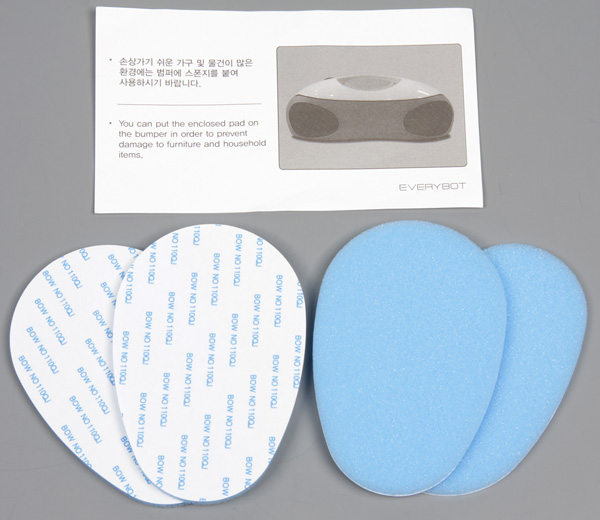
Эти накладки также снизят громкость ударов робота о мебель и стены. Бамперы закреплены на подпружиненных подвесках, а сдвиг бампера при столкновении вызывает срабатывание датчиков препятствий.
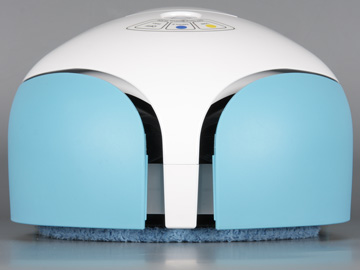
Сверху, в той части, которую для определенности можно назвать передней, есть механическая кнопка запуска и остановки уборки.
Кнопка изготовлена из молочно-белого полупрозрачного пластика. Снизу она подсвечивается зеленым или синим, что помогает определить состояние робота. Наклейка рядом разъясняет индикацию уровня заряда. Во время зарядки кнопка мигает раз в две секунды зеленым при низком уровне, также часто синим при среднем уровне и не подсвечивается после окончания зарядки. Это очень неудобный способ индикации, так как нужно долго смотреть на робота, чтобы определить его состояние, и окончание зарядки никак не отличить от состояния, когда по какой-то причине внешнее питание не подается. При нормальной работе кнопка подсвечивается синим, непосредственно перед окончанием работы из-за разряда аккумулятора и при ошибке кнопка мигает зеленым, и некоторое время после автоматического завершения уборки кнопка горит зеленым. Дополнительно о некоторых изменения в состоянии робот информирует с помощью негромких звуковых сигналов (запуск и остановка уборки, окончание зарядки, ошибка). Сверху сзади есть оптический датчик, состоящий из ИК-диода и ИК-приемника.

С помощью этого датчика робот определяет, не находится ли он под мебелью в тот момент, когда уборка завершается, и если да, находится, то робот старается выбраться на открытое пространство, чтобы пользователю проще было робота обнаружить. ИК-приемник, видимо, также принимает сигналы от пульта дистанционного управления. Внизу в задней части есть разъем для зарядки аккумулятора работа.

Длина кабеля внешнего адаптера питания составляет 115 см.

Аккумуляторная батарея находится под крышкой на днище. Батарея составлена из трех элементов форм-фактора 18650.

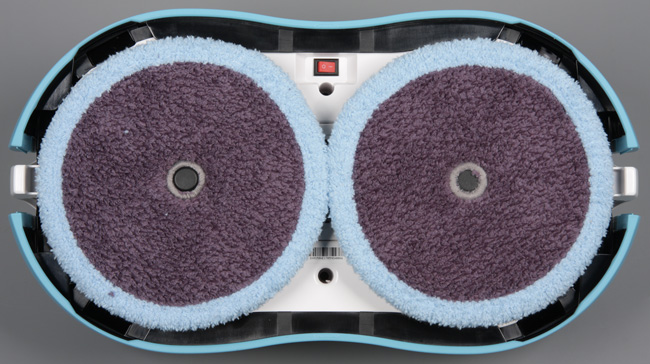
На днище находятся клавиша питания, крышка отсека аккумулятора с наклейкой и два диска. Снизу на бамперах расположены по два ИК-датчика перепада высоты, благодаря которым робот может избежать падения со ступенек.

Диски оснащены электрическими приводами и могут вращаться независимо друг от друга. На эти диски закрепляются круглые площадки для протирочных салфеток.

А уже на эти площадки на липучках фиксируются сами протирочные салфетки.
Оси приводов относительно перпендикуляра к днищу немного наклонены так, что края дисков в центре робота чуть приподняты относительно пола, поэтому в рабочем состоянии робот сильнее прижимает края салфеток в передней и задней части корпуса. В итоге передняя и задняя часть робота движется в направлении противоположном вращению соответствующего диска. По крайне мере, это правило выполняется на достаточно ровном плоском полу. Если оба диска вращаются в разных направлениях с одинаковой скоростью, то робот движется боком, а если диски вращаются в одну сторону — то робот вращается на месте. Если скорости вращения дисков различаются, то робот движется по дуге. Прямо вперед или назад робот двигаться не умеет.
Перед началом уборки салфетки нужно хорошо смочить водой и отжать, а потом закрепить на площадках так, чтобы центральное отверстие в салфетке совместилось с выступом в центре площадки. Для поддержания салфеток во влажном состоянии, в емкости на площадках нужно залить воду, и закрыть заливные отверстия заглушками из упругого пластика. В эти емкости вмещается примерно 60 мл воды. Отметим, что заливать нужно именно чистую воду.
Для варианта сухой уборки, когда нужно убрать с пола остатки жидкости, смачивать салфетки и заливать воду в резервуар, разумеется, уже не требуется. Салфетки изготовлены с использованием микроволокна. Они относительно толстые и могут удерживать существенное количество жидкости. Верхний впитывающий слой волокнистый.

А снизу мягкая бахрома чередуется с щетинками, помогающими оттирать грязь с пола. Периметр салфеток окаймлен бахромой голубого цвета.

Вода на салфетки поступает через два отверстия в площадках, при этом специальная система обеспечивает более-менее равномерную скорость подачи воды на салфетки. По окончании уборки, площадки с салфетками нужно снять, остатки воды из резервуаров вылить, оставить площадки сохнуть с открытыми заглушками, а салфетки вымыть и высушить. Салфетки можно стирать в стиральной машине при 40 градусах, отжимать и сушить при нормальной температуре.
К роботу прилагается небольшой ИК-пульт ДУ. Его корпус пластиковый, белый и зеркально-гладкий сверху и черный матовый снизу. Кнопки изготовлены из резиноподобного материала.

Радиус действия не очень большой, где-то с трех метров и далее робот на команды с пульта уже может не реагировать. Очень неудобно то, что находящийся в состоянии ожидания робот с пульта не управляется.
Основной режим уборки — это автоматический режим. В этом режиме робот самостоятельно перебирает несколько вариантов движения. Запускается автоматический режим или кнопкой на корпусе робота, или кнопкой Auto на пульте. Останавливается уборка или все той же кнопкой на роботе, или красной кнопкой на пульте. Только с пульта пользователь может включить режим локальной уборки, заставить робота двигаться только вдоль стен и других препятствий, выбрать S- или Y-образную траекторию движения. В любом случае, при столкновении с препятствиями робот останавливается и меняет направление движения. Нажатие на кнопки вправо или влево на пульте, заставляет робота вращаться на месте по или против часовой стрелки, а кнопки вперед или назад отвечают за прямолинейное движение робота одним или другим боком. Робота можно использовать в ручном режиме, держа его в руках и прижимая к очищаемой поверхности. Ручной режим включается долгим нажатием на кнопку на корпусе робота, при этом датчики отрыва от пола блокируются. Робот не очень тяжелый, поэтому рука не будет быстро уставать при чистке вертикальных поверхностей, единственно, ручка робота не рассчитана на крупную мужскую руку. Изготовлен робот в Корее. Компания-производитель имеет официальное представительство в России, есть и официальные сервисные центры в регионах России.
Тестирование
Тестирование этого робота для протирки полов было несколько поверхностным, так как у нас нет ни соответствующей методики, ни подходящего для серьезных тестов помещения. На пробу мы запускали робота в нескольких помещениях с линолеумом на полу. Видео ниже демонстрирует варианты локальной уборки, движение по S- и Y-образной траектории, уборку вдоль препятствий и ручное управление движением.
Обратим внимание на то (3:37 на видео), как робот объезжает черный коврик, видимо, ориентируясь на датчики отрыва от пола. Робот никак не ориентируется в пространстве и не строит карту, его перемещение имеет условно случайный характер. Препятствия робот определяет только при столкновении с ними, поэтому ударяется о них довольно сильно, с громким звуком. Увлажнение пола умеренное, через несколько минут след за роботом уже высыхает (но влажность в помещении скорее была низкой). Поэтому этого робота можно использовать для уборки всех видов гладких полов, включая невлагостойкий ламинат, паркет и дощатые полы. В наших условиях вода в резервуарах заканчивалась примерно на 30-й минуте работы, при этом бо́льшую часть времени влажный след шел двумя полосами с сухим промежутком в центре. От одного заряда аккумулятора робот проработал один раз 48 минут, второй — 66 минут. Учитывая это, имеет смысл сначала запускать робота на 30 минут, останавливать, менять салфетки и доливать воду в резервуар, а затем запускать уже до разряда аккумулятора. В конце одного из циклов уборки салфетки приобрели вот такой вид:

Грязи с салфеток смывается много, также салфетки хорошо собирают мелкий мусор, волосы, нитки и прочее. Однако лучше предварительно очистить пол от мусора, например с помощью робота-пылесоса. Вручную отстирать салфетки непросто, но стирка в стиральной машине придает им практически изначальный вид.
Заряжается робот относительно быстро, в наших тестах за 56 минут первый раз и за 61 минуту — второй. График потребления от сети во время зарядки показан ниже:

Во время зарядки потребление достигает порядка 20 Вт, заряженный и подключенный к сети робот потребляет около 3 Вт, адаптер, не подключенный к роботу — примерно 0,2 Вт.
Робота нельзя назвать тихим. В основном звук — это работа электрических приводов, их завывание громкое и весьма раздражает. Уровень шума зависит от скорости и траектории движения. С расстояния порядка 1,2 м наши замеры показали 56-61 дБА. Удары о препятствия очень громкие, впрочем, защитные поролоновые накладки сделают их тише.
Выводы
Объективно и в числах качество уборки оценить довольно сложно, но, учитывая впитывающую способность салфеток, их рабочую поверхность с бахромой и щетинками, то, как салфетки вращаются и прижимаются, а также хорошее увлажнение пола, стоит ожидать, что этот робот справится с влажной уборкой пола лучше, чем роботы-пылесосы с протирочными насадками или даже специализированные роботы-полотеры, которые не так активно воздействуют на убираемую поверхность. К существенным недостаткам робота можно отнести его относительно большую высоту, а также то, что он не снижает скорость перед препятствиями.
Упакован робот и все к нему в не очень большую скромно оформленную коробку из гофрированного картона.

Содержимое коробки защищают вставки из пенопласта. Пластиковая ручка сверху облегчает транспортировку покупки. В комплекте поставки есть все необходимое, чтобы сразу после зарядки начать использовать робота (инструкции по эксплуатации случайно в коробке не оказалось, но ее нам прислали в виде файла PDF).

Робот является продолжением линейки автоматических полотеров компании Everybot — RS500 и RS700. Новый робот Everybot Edge немного компактнее и легче предыдущих и, главное, не имеет механических бамперов, теперь препятствия определяются только с помощью инфракрасных датчиков приближения.

Согласно нашим измерениям, высота Everybot Edge в снаряженном состоянии составляет 136 мм.

В сравнении с высотой типичного робота-пылесоса это относительно много, что потенциально уменьшает доступную роботу поверхность пола. Длина корпуса равна 305 мм, а ширина 151,5 мм. Чистящие салфетки немного выступают за габариты корпуса, что, по словам производителя, повышает качество уборки впритык к препятствиям.

Весит робот 1562 г без учета залитой воды. Корпус робота в основном изготовлен из черного пластика с матовой поверхностью. Перемычка сверху образует ручку, за которую робота удобно переносить, и за которую его держит пользователь в режиме ручной уборки. Нижняя часть ручки — темно-серая, а верх имеет серебристое покрытие, которое относительно легко повреждается. Периметр робота опоясывают широкие вставки из прозрачного тонированного пластика с зеркально-гладкой поверхностью, за которыми размещены ИК-датчики препятствий и перепада высоты.

На ручке слева (перед — это где написано Everybot) есть механическая кнопка запуска и остановки уборки, являющаяся и индикатором состояния. Кнопка изготовлена из молочно-белого полупрозрачного пластика и имеет серебристое покрытие. Кольцо на кнопке оставлено без покрытия. Кнопка в зависимости от состояния робота подсвечивается синим, желтым или красным. Во время зарядки кнопка мигает раз в две секунды желтым, при достижении полного заряда подсветка кнопки гаснет. Это очень неудобный способ индикации, так как нужно долго смотреть на робота, чтобы определить его состояние, и окончание зарядки никак не отличить от состояния, когда по какой-то причине внешнее питание не подается. При нормальной работе кнопка подсвечивается синим, непосредственно перед окончанием работы из-за разряда аккумулятора кнопка подсвечивается желтым. При устранимых проблемах, возникших во время уборки, кнопка мигает желтым. Мигание красным свидетельствует о проблемах с питанием или о чем-то более серьезном. Дополнительно о некоторых изменениях в состоянии робот информирует с помощью негромких звуковых сигналов (запуск и остановка уборки, окончание зарядки, ошибка). Сверху на противоположном от кнопки конце ручки есть оптический датчик, состоящий из ИК-диода и ИК-приемника. С помощью этого датчика робот определяет, не находится ли он под мебелью в тот момент, когда уборка завершается, и если да, находится, то робот старается выбраться на открытое пространство, чтобы пользователю проще было робота обнаружить. ИК-приемник, видимо, также принимает сигналы от пульта дистанционного управления.

Внизу в задней части есть разъем для зарядки аккумулятора работа.

Длина кабеля внешнего адаптера питания составляет 1,4 м. Аккумуляторная батарея находится под крышкой на днище. Батарея составлена из трех элементов форм-фактора 18650.

На днище находятся крышка отсека аккумулятора с наклейкой и два диска. Диски оснащены электрическими приводами и могут вращаться независимо друг от друга. На эти диски закрепляются круглые площадки для протирочных салфеток (на фотографии ниже слева на диске площадка установлена, справа — площадки нет).

На площадки на липучках фиксируются сами протирочные салфетки.

Оси приводов относительно перпендикуляра к днищу немного наклонены так, что края дисков в центре робота чуть приподняты относительно пола, поэтому в рабочем состоянии робот сильнее прижимает края салфеток справа и слева относительно корпуса. В итоге при вращении дисков в противоположном направлении с равной скоростью робот движется прямолинейно вперед или назад. По крайне мере, это правило выполняется на достаточно ровном плоском полу, и если сцепление дисков с полом одинаковое. Если диски вращаются в одну сторону с одинаковой скоростью, то робот вращается на месте. Если скорости вращения дисков различаются, то робот движется по дуге. Боком (узкой частью корпуса вперед) робот двигаться не умеет. Диаметр площадок 148 мм, а диаметр салфеток примерно 165 мм.
Перед началом уборки салфетки нужно хорошо смочить водой и отжать, а потом закрепить на площадках так, чтобы центральное отверстие в салфетке совместилось с выступом в центре площадки. Для поддержания салфеток во влажном состоянии, в емкости на площадках нужно залить воду, и закрыть заливные отверстия заглушками из упругого пластика. В эти емкости вмещается 66 мл воды. Отметим, что заливать нужно именно чистую воду.

Вода на салфетку поступает через закрытое волокнистым материалом отверстие в площадке.

По окончании уборки нужно снять площадки с салфетками, вылить остатки воды из резервуаров, оставить площадки сохнуть с открытыми заглушками, а салфетки вымыть и высушить. Производитель рекомендует мыть накладки в мыльном растворе с использованием специальной щетки, включенной в комплект поставки. По нашему опыту салфетки также допустимо стирать в стиральной машине при 40 градусах, отжимать и сушить при нормальной температуре.
Салфетки изготовлены с использованием микроволокна. Они относительно толстые и могут удерживать существенное количество жидкости. Верхний впитывающий слой волокнистый. Нижняя поверхность у салфеток различается. У зеленых — это просто махровая ткань из микроволокна.
Данные салфетки рекомендуется использовать на гладких полах.
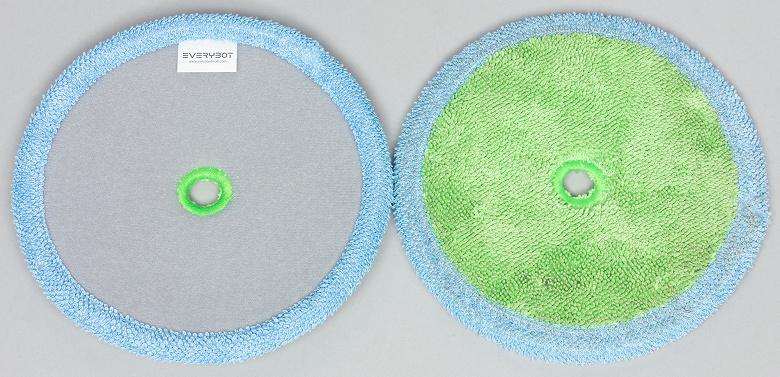
У серых салфеток снизу мягкая бахрома чередуется с щетинками, помогающими выскребать грязь из небольших углублений.

Эти салфетки лучше справятся с очисткой полов с неровной поверхностью, например пола, выложенного плиткой.

Периметр салфеток обоих типов окаймлен махровой тканью из микроволокна.


К роботу прилагается небольшой ИК-пульт ДУ. Его корпус пластиковый, белый и матовый снаружи. Большинство кнопок изготовлено из резиноподобного материала, и только центральная кнопка — жесткая пластиковая с серебристым покрытием. В руке пульт лежит удобно.

Основной режим уборки — автоматический. В этом режиме робот самостоятельно перебирает несколько вариантов движения. Запускается автоматический режим или кнопкой на корпусе робота, или кнопкой запуска/остановки на пульте, или кнопкой Auto на пульте. Только с пульта пользователь может включить режим локальной уборки (кнопка Focus), заставить робота двигаться только вдоль стен и других препятствий (Edge), выбрать Y-образную траекторию движения (Y-mode), запустить режим интенсивной очистки (Intensive), включить ограничение на 50 минут работы (воды в емкостях хватает примерно на это время; кнопка 50min) и выключить датчики перепада высоты. Последнее может пригодиться, если робот убирает полы с очень темными участками. Кроме того, кнопками веред/назад и вправо/влево можно вручную управлять движением робота. Также робота можно использовать в ручном режиме, держа его в руках и прижимая к очищаемой поверхности. Ручной режим включается двойным нажатием на кнопку на корпусе робота, когда робот удерживают на весу. Робот не очень тяжелый, поэтому рука не будет быстро уставать при чистке вертикальных поверхностей. Изготовлен робот в Корее. Компания-производитель имеет официальное представительство в России, есть и официальные сервисные центры в регионах России.
Тестирование
Тестирование этого робота для протирки полов было несколько поверхностным, так как у нас нет ни соответствующей методики, ни подходящего для серьезных тестов помещения. На пробу мы запускали робота в нескольких помещениях с линолеумом на полу. Робот никак не ориентируется в пространстве и не строит карту, его перемещение имеет условно случайный характер. Робот объезжает черный коврик, видимо, ориентируясь на датчики отрыва от пола. Робот может не касаться высоких светлых препятствий, определяя их наличие ИК-датчиками. Столкновение робота с чем-то на полу, как правило, происходит не на высокой скорости, шума от этого немного и робот почти моментально отъезжает от препятствия и меняет направление движения. Лучше использовать робота на достаточно ровных полах, так как участки даже с небольшим перепадом высоты робот может воспринимать как препятствие, которые нужно объезжать. Никакие пороги робот не преодолевает, в лучшем случае он может проехать через стык напольного покрытия, закрытый плоской невысокой планкой. В целом, робот неплохо убирает в тех местах, где на полу очень много препятствий, хотя один раз и не смог выбраться из-под стула, расстояние между ножками которого немного больше длины корпуса робота, при этом забраться под стул и выбраться из-под него можно было только с одной стороны из четырех. В режиме уборки вдоль стен робот движется практически вплотную к стене, захватывая салфеткой нижнюю часть плинтуса. Нам показалось, что в автоматическом режиме робот не очень тщательно убирает вплотную к стенам, поэтому лучше во время уборки на какое-то время вручную включить режим следования вдоль стен. Увлажнение пола умеренное, через несколько минут след за роботом уже высыхает (но влажность в помещении скорее была низкой), поэтому робота можно использовать для уборки всех видов гладких полов, включая невлагостойкий ламинат, паркет и дощатые полы. В наших условиях вода в резервуарах заканчивалась примерно на 50-й минуте работы, при этом бо́льшую часть времени влажный след шел двумя полосами с сухим промежутком в центре. Напомним, что с помощью оптического датчика робот определяет наличие препятствия сверху, и если он оказывается под мебелью в конце цикла уборки (с ограничением по времени или до почти полного разряда аккумулятора), то он старается выбраться на открытое пространство, чтобы пользователю проще было его найти. От одного заряда аккумулятора робот отработал 1 час 55 минут. Салфетки приобрели вот такой вид:
Грязи с салфеток смывается много, также салфетки хорошо собирают мелкий мусор, волосы, нитки и прочее. Однако лучше предварительно очистить пол от мусора, например с помощью робота-пылесоса. Вручную отстирать салфетки непросто, но стирка в стиральной машине придает им практически изначальный вид.
Заряжается робот относительно быстро, в наших тестах за 1 час 17 минут. Во время зарядки потребление от розетки достигает порядка 16,5 Вт, заряженный и подключенный к сети робот потребляет около 2,2 Вт, а адаптер, не подключенный к роботу — примерно 0,16 Вт.
Робот относительно тихий. С расстояния порядка 1,2 м над роботом наши замеры показали, что во время фазы быстрого прямолинейного движения уровень шума достигает 54 дБА, при замедлении робота он снижается до 50 дБА. Для сравнения, уровень шума в этих условиях обычного (не самого тихого) пылесоса равен примерно 76,5 дБА.
Выводы
Учитывая впитывающую способность салфеток, особенности их рабочей поверхности, вращение и прижим салфеток к полу, а также хорошее увлажнение пола, стоит ожидать, что этот робот хорошо справится с влажной уборкой пола. Уборка в ручном режиме стала удобнее, так как в сравнении с предыдущими моделями масса этого робота снизилась. Everybot Edge имеет корпус уменьшенных габаритов, что потенциально может улучшить качество уборки впритык к препятствиям. У робота отсутствуют подвижные бамперы, что также потенциально увеличивает надежность. Вдобавок новая модель работает существенно тише прежней. Сожалеть можно только о том, что теперь зарядная база отсутствует даже как опция.
В заключение предлагаем посмотреть наш видеообзор робота-полотера Everybot Edge:
Что делать, если нужно не просто убрать пыль, а как следует протереть пол тряпкой? На помощь придет робот-полотер.
К роботам-пылесосам мы уже начали привыкать – они получили достаточно широкое признание, и этот рынок продолжает расти. Но влажную-то уборку никто не отменял! И тут на помощь придет специалист более широкого профиля, о котором я и расскажу.
Технические характеристики:
Время работы, мин
Время зарядки, мин
Емкость аккумулятора, мАч
Инфракрасные, механические касания бампером, оптические PSD перепада высоты, световые
Открываю коробку – и первое, что вижу: «I’m very happy to see you». Мелочь, а улыбку вызывает – Everybot RS700 начинает общаться с тобой, еще не будучи извлеченным из упаковки. Что ж, дружок, вылезай на свет!
Комплектация включает два резервуара для воды, четыре круглые салфетки, блок питания, пульт ДУ с батарейками, набор инструкций и зарядную станцию. Последняя – штука опциональная, устройство можно подключать и штекером напрямую.
Выглядит робот симпатично: черный корпус разбавляют оранжевые вставки. Один коллега даже сравнил его с таблеткой антидепрессанта: если этот красавчик возьмет на себя хотя бы одну повседневную задачу, настроение без сомнения улучшится.
По бокам устройства находятся резиноподобные бамперы, в середине каждого – окошко, за ним скрываются сенсоры.
Дело в том, что сам Everybot RS700 не умеет строить карту помещения и ориентируется в пространстве исключительно за счет датчиков – механических и инфракрасных. На корпусе всего две кнопки: та, что на «пузе», отвечает за включение гаджета, а вторая – сверху – запускает и останавливает программу.
Причем в последнюю встроен индикатор. Надо сказать, корейское понимание индикации довольно своеобразное: при зарядке кнопка мигает раз в две секунды желтым, после заполнения «банки» до 70% – синим, а когда насытится под завязку – гаснет, издавая протяжный звуковой сигнал (это вот удобно).
Но, думаю, о сухой уборке и так все известно, поэтому перейду сразу к поломойному варианту. Пункт первый: заправляю резервуары (полые диски с крышками по 70 мл каждый). В один добавляю пару «пшиков» жидкого мыла, в другой – просто воду. Перевернув резервуар, вижу липучку и кусочек голубой ткани – по сути, фитилек, по которому жидкость постепенно подается на салфетку. Последняя, как вы могли догадаться, крепится к той самой липучке.
Пункт второй: вставляю резервуары до щелчка в корпус и прилепляю салфетки. Пункт третий: включаю кнопку на «пузе» и ставлю Everybot RS700 на пол. Далее есть варианты: либо просто запустить робота, нажав на корпусе треугольную кнопку (или красную на пульте), либо выбрать «Y-образное движение, уборка возле стен, сухая уборка, фокусная уборка (для оттирания пятен в определенных местах)». В любом случае можно активировать режим Turbo – и наш трудяга начнет более активно шевелить моторами.
Как же работает Everybot RS700? Передвигается он посредством вращения двух дисков, на которых надеты чистящие салфетки. Диски установлены под небольшим углом, за счет чего упор оказывается на краях. Отдельных колесиков у модели нет, что огромный плюс: благодаря тому что устройство всей массой опирается именно на тряпки, качество уборки превосходит решения конкурентов.
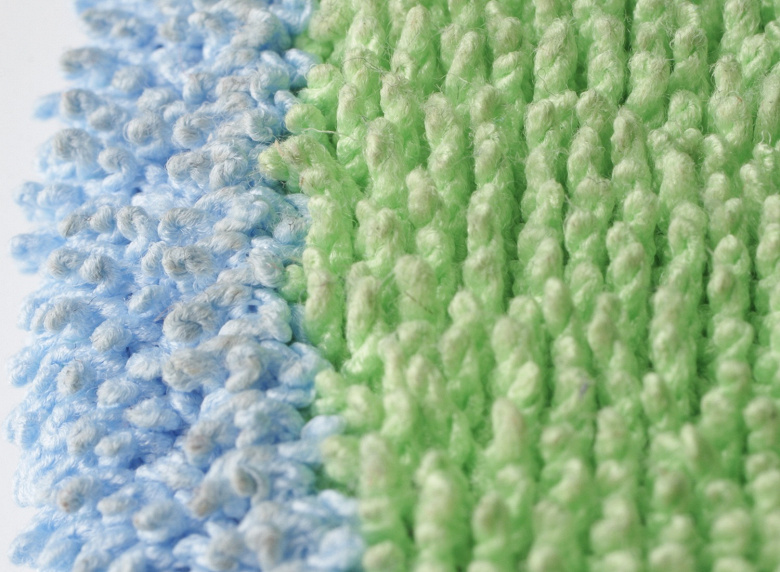
Если близко взглянуть на салфетки, видна их достаточно сложная структура: материал многослойный, а вплетенные в него жесткие волокна помогают, судя по всему, оттирать сложные пятна.
Что ж, подготовка окончена, инструкции получены – поехали! За время тестирования устройства мы с представительницей прекрасной половины нашего офиса успели проверить все его режимы, а посему делимся опытом. Основной момент – на время уборки желательно перекрывать доступ в другие помещения (скажем, если хотите, чтобы робот помыл на кухне, лучше закрыть туда дверь). Благодаря ИК-датчикам, Everybot RS700 понимает, что заехал под мебель, и перед окончанием уборки старается выбраться на открытое пространство – дабы хозяину было легче его найти (у нас он ни разу не остался в засаде). Время уборки составляет 50 минут – за этот период вода из резервуаров заканчивается и нужно постирать салфетки. Зарядки аккумулятора хватает на два цикла.
Кстати, Everybot RS700 можно использовать и в ручном режиме – например, для мытья окон или зеркал (держать очень удобно за профилированную ручку). Для перевода в данный режим требуется несколько секунд подержать кнопку включения, после чего датчики отрыва от пола перестают работать.
Качество уборки с помощью Everybot RS700 высокое, причем он отлично собирает и волосы, и шерсть животных. Впрочем, полотер – не замена пылесоса, в автоматическом режиме он комбинирует различные программы: сначала движется преимущественно в центре комнаты, затем вдоль стен, далее еще несколько раз меняет режимы. И здесь могу добавить, что отсутствие системы навигации у Everybot RS700 – это тоже преимущество! Если бы у него была карта помещения, он, скорее всего, проходил бы каждое место единожды, тогда как наш герой делает это по нескольку раз.
Впрочем, не стоит воспринимать робота-полотера как средство капитальной уборки. К углам комнаты и вплотную к краям возле стен он подобраться не может, как и залезть под шкафы, если у них ножки ниже 11 см.
Двигается Everybot RS700 очень тихо. Думаю, его вполне можно рекомендовать семьям с маленькими детьми – работая в соседней комнате, он точно не помешает дневному сну.
Важно отметить, что Everybot RS700 всегда понимает, что подъехал к обрыву: сколько я ни пытался ввести его в заблуждение, он ни разу не бросился с лестницы. Наоборот, порой даже перестраховывался, не заезжая на коврик, – думая, видимо, что это конец дороги.
Что бы хотелось доработать? Систему крепления салфеток к резервуарам с жидкостью: после многократных уборок липучки теряют силу. Это некритично, так как робот стоит на этих самых салфетках и из-под него они никуда не убегут, но все же хотелось бы поаккуратнее.
К остальному придраться сложно – бесспорно продуманный, качественный робот-помощник, которого без опасений можно пускать и на ламинат, и на паркет, и на другие покрытия, не любящие влаги: количество жидкости, поступающей на салфетки, тщательно дозируется – влажный след после прохода полотера исчезает через несколько минут.
Читайте также: